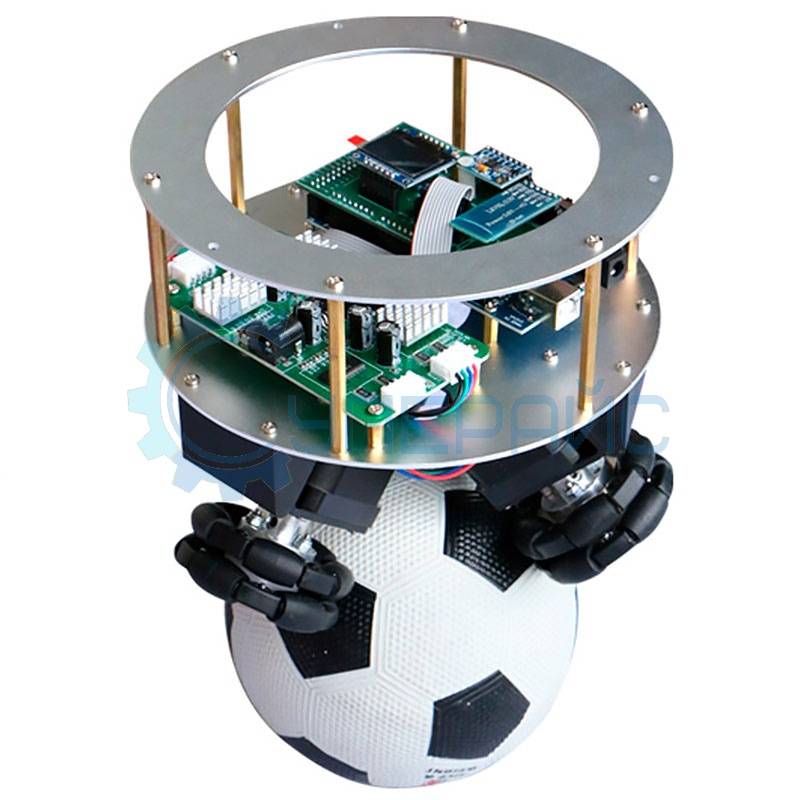
Балансирующий на мяче робот WHEELTEC Ballbot на базе STM32
Код товара: 13530
 Гарантия 3 месяца
Гарантия 3 месяца
 Официальный дилер WHEELTEC в России
Официальный дилер WHEELTEC в России


 О товаре
О товаре  Доставка
Доставка
Транспортной компанией по РФ и СНГ
Курьером по Москве
Самовывоз из магазина
 Оплата
Оплата
Для юрлиц – переводом на расчётный счёт
Для физлиц – банковской картой онлайн, наложенным платежом и наличными
 Для
бизнеса
Для
бизнеса
Аккредитованы на ЭТП
Участвуем в госзакупках по 223-ФЗ и 44-ФЗ
Оказываем помощь в разработке ТЗ
 О товаре
О товаре ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ WHEELTEC Ballbot
| Технические характеристики WHEELTEC | |
| Управляющий контроллер |
STM32 |
| Управление |
управление автомобилем через среду программирования IAR, посредством Bluetooth модуля из мобильного приложения |
| Функциональные возможности | балансировка робота на шаре |
| Программирование | среда разработки IAR |
|
Беспроводная связь |
Bluetooth модуль |
| Колесо | 60 мм |
| Характеристики шагового модуля двигателя LV8731V | |
| Номинальный ток | 2 А |
| Максимальный ток | 2.5 А |
| Напряжение | 9 - 32 В |
| Частота входного контроля | 0 - 13 кГц |
| Защита | от перегрузки по току, обратного подключения, короткого замыкания |
| Рабочая температура | - 10 ∼ 55°С |
| Размер платы | 103.2 мм х 55.2 мм х 1.6 мм |
| Вес | 35 г |
| Характеристики контроллера STM32 | |
| Микроконтроллер | STM32F103RCT6 |
| Тактовая чистота | 72 мГц |
| Цифровые входы/выходы | 64 |
| Чип IMU | MPU6050 |
| CAN интерфейс | VP230 |
| Защита | от электростатического разряда, предохранитель с самовосстановлением |
| Интерфейс | USB Type-C |
| Размер | 50 x 50 мм |
| Вес | 15,7 г |
| Характеристики акселерометра MPU-6050 | |
| Напряжение питания | 3.5 - 6 В |
| Потребляемый ток | 500 мкА |
|
Ток в режиме пониженного потребления |
10 мкА при 1,25 Гц, 20 мкА при 5 Гц, 60 мкА при 20 Гц, 110 мкА при 40 Гц |
| Диапазон |
± 2, 4, 8, 16g |
| Разрядность АЦП | 16 |
|
Интерфейс |
I2C (до 400 кГц) |
|
Контакты модуля |
VCC — положительный контакт питания GND — земля SDA — линия данных I2C SCL — линия синхроимпульсов I2C INT — настраиваемое прерывание AD0 — I2C адрес по-умолчанию AD0 подтянут к земле, поэтому адрес устройства — 0x68 если соединить AD0 к контактом питания, то адрес изменится на 0x69 XCL, XDA — дополнительный I2C интерфейс для подключения внешнего магнитометра |
| Общие характеристики | |
| Дисплей | OLED, 96" |
| Материал | алюминиевый сплав |
| Питание | адаптер питания 12 В, 10 А |
| Габариты |
190 мм x 190 мм x 141 мм |
| Вес | 1.4 кг |
| Комплектация | |
 |
колесо - 3 шт |

|
STM32F103RCT6 – 1 шт |

|
мяч – 1 шт |

|
OLED дисплей – 1 шт |

|
Bluetooth модуль – 1 шт |

|
адаптер питания – 1 шт |

|
кабель – 1 шт |

|
USB кабель – 1 шт |

|
модуль двигателя LV8731V– 1 шт |
 |
опорная пластина – 2 шт |

|
винты – 1 набор |
 |
двигатель – 3 шт |

|
переходная пластина – 1 шт |
|
|
муфта – 3 шт |
|
|
кронштейн двигателя – 3 шт |
 Обратите внимание! Набор представляет собой конструктор и предполагает наличие у пользователя базовых навыков конструирования, программирования и отладки. Необходимые учебно-методические материалы по сборке и программированию робота размещены в разделе «ДОКУМЕНТАЦИЯ И ПО».
Обратите внимание! Набор представляет собой конструктор и предполагает наличие у пользователя базовых навыков конструирования, программирования и отладки. Необходимые учебно-методические материалы по сборке и программированию робота размещены в разделе «ДОКУМЕНТАЦИЯ И ПО».
Менеджеры по работе с клиентами не предоставляют консультации по программированию: набор предполагает самостоятельную сборку управляющего устройства на базе микроконтроллера и набора датчиков с последующим программированием законченного устройства в целях развития и формирования у пользователя инженерного мышления и умений программирования робототехнических систем.

Технические характеристики, внешний вид и комплектация товара могут быть изменены производителем без предварительного уведомления.
Благодарственные письма
Посмотреть все




С этим товаром покупают
Для физических лиц при заказе от 3000 рублей Почтой России

Для физических лиц при заказе от 3000 рублей Почтой России

Функция перемещения, обнаружения и объезда препятствий, умение отслеживать линии и способность движения по заданной траектории, подъем на возвышенность и т.д.





отслеживать заказы
- Москва
- Санкт-Петербург
- Екатеринбург
- Новосибирск
- Краснодар
- Нижний Новгород
- Челябинск
- Пермь
- Воронеж
- Самара
- Казань
- Волгоград
- Ростов-на-Дону
- Саратов
- Тула
- Тюмень
- Уфа
- Абакан
- Архангельск
- Астрахань
- Барнаул
- Белгород
- Благовещенск
- Брянск
- Вологда
- Владивосток
- Владикавказ
- Владимир
- Волгоград
- Волгодонск
- Грозный
- Евпатория
- Иркутск
- Иваново
- Ижевск
- Йошкар-Ола
- Красноярск
- Калининград
- Кемерово
- Киров
- Кострома
- Кузнецк
- Курск
- Кызыл
- Липецк
- Майкоп
- Махачкала
- Мурманск
- Нальчик
- Нижний Тагил
- Новокузнецк
- Новороссийск
- Новый Уренгой
- Омск
- Оренбург
- Орёл
- Пенза
- Петрозаводск
- Петропавловск-Камчатский
- Псков
- Рязань
- Симферополь
- Саранск
- Саратов
- Севастополь
- Смоленск
- Сочи
- Ставрополь
- Стерлитамак
- Сургут
- Сыктывкар
- Тамбов
- Тверь
- Тольятти
- Томск
- Ульяновск
- Улан-Удэ
- Хабаровск
- Ханты-Мансийск
- Чебоксары
- Черкесск
- Чита
- Элиста
- Южно-Сахалинск
- Якутск
- Ярославль