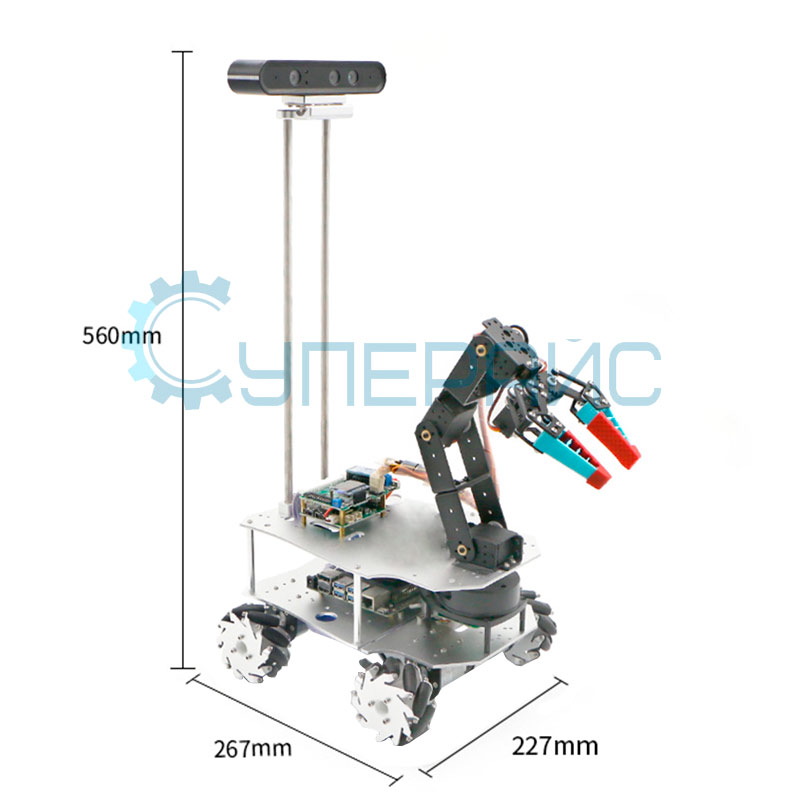
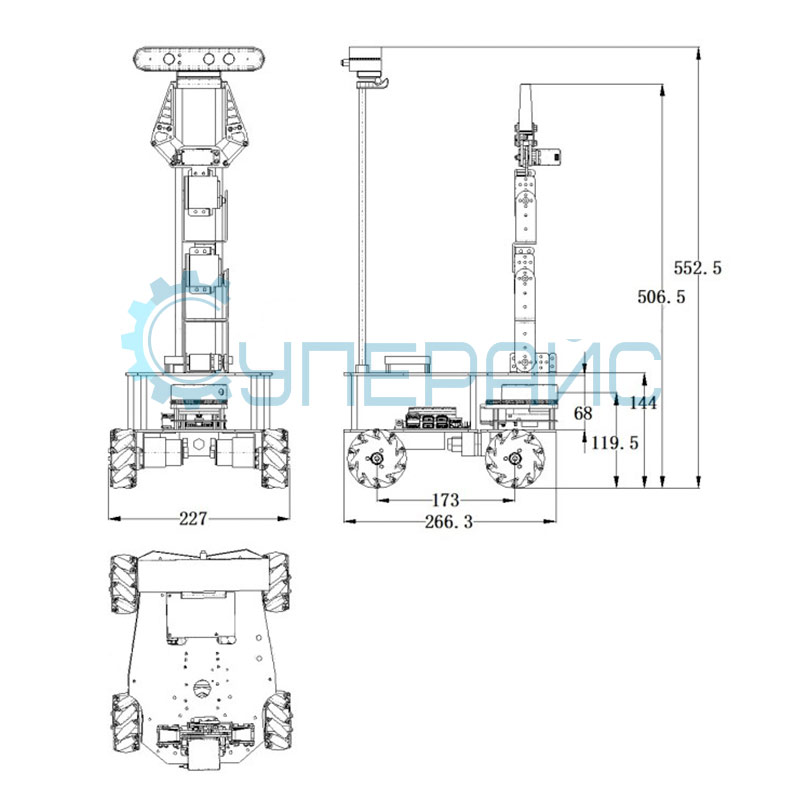
Робот-рука WHEELTEC R500A с камерой глубины Astra Pro
Код товара: 15482
 Гарантия 3 месяца
Гарантия 3 месяца
 Официальный дилер WHEELTEC в России
Официальный дилер WHEELTEC в России





 О товаре
О товаре  Доставка
Доставка
Транспортной компанией по РФ и СНГ
Курьером по Москве
Самовывоз из магазина
 Оплата
Оплата
Для юрлиц – переводом на расчётный счёт
Для физлиц – банковской картой онлайн, наложенным платежом и наличными
 Для
бизнеса
Для
бизнеса
Аккредитованы на ЭТП
Участвуем в госзакупках по 223-ФЗ и 44-ФЗ
Оказываем помощь в разработке ТЗ
 О товаре
О товаре ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ WHEELTEC R500A
| Характеристики манипулятора | |
| Операционная система | Ubuntu 18.04 |
| Плата управления |
Raspberry Pi 4B |
| Двигатель |
MG513 |
| Микроконтроллер | STM32F407BET6 |
| Энкодер |
инкрементный датчик Холла (магнитный) фазы AB, 500 импульсов за оборот |
| Привод |
четырехколесная конструкция Mecanum с маятниковой подвеской |
|
Колеса |
диаметр 75 мм |
|
Степень свободы (DOF) |
4 свободы |
| Грузоподъемность | 6 кг |
| Максимальная скорость | 1.4 м/с |
| Камера глубины |
Astra RGBD |
| Сенсор IMU | ICM20948 |
| Управление | мобильное приложение, беспроводной контроллер PS2, CAN |
| Характеристики Raspberry Pi 4B | |
| SoC |
Broadcom BCM2711 |
| Быстродействие | 200 GFLOPs |
| Процессор | ARM Cortex-A72 1.5 ГГц 64-разрядный (4 ядра) |
| Графический процессор |
Broadcom VideoCore VI @ 500 МГц |
| Оперативная память | 4 ГБ |
| Bluetooth |
v5.0 с BLE |
|
Порты для периферии |
USB2.0 x 2, USB3.0 x 2 |
|
Цифровой аудио/видеовыход |
2 x micro-HDMI версии 2.0 |
|
Максимальное выходное разрешение |
2160p (60 Гц) |
|
Максимальное разрешение в режиме двух мониторов |
2160p (30 Гц) |
|
Аналоговый аудио/видеовыход |
4-контактный мини-джек 3.5 мм |
|
Порт для камеры |
Camera Serial Interface (MIPI CSI) |
|
Порт для экрана |
Display Serial Interface (MIPI DSI) |
|
Карта памяти |
microSD, макс размер 32 ГБ |
|
Порты ввода-вывода GPIO |
40 |
|
Цифровой аудио/видеовыход |
2×micro-HDMI версии 2.0 |
| WiFi | 802.11 b/g/n/ac, двухдиапазонный Wi-Fi адаптер (2.4/5 ГГц) |
| Проводная сеть |
Ethernet 1 Гбит/с |
| PoE |
есть (с использованием PoE HAT) |
| Рабочая температура | 0 ~ 50°C |
| Питание | Type-C (5 В, 3 А) |
| Габариты |
85 x 56 x 17 мм |
| Характеристики камеры глубины Astra Pro | |
| Разрешение по глубине | 640 х 480 |
| Частота обновления и разрешение RGB | до 640 х 480, со скоростью 30 кадров в секунду |
| Угол поля зрения датчика RGB (горизонталь х вертикаль) | 63.1° х 49.4° |
| Угол обзора датчика глубины (горизонталь х вертикаль) |
58.4° х 45.5° |
| Базовая линия | ∼ 60 см |
| Диапазон глубины | 0.6 - 4 м |
| Габариты | 165 х 40 х 30 мм |
| Интерфейс передачи данных | USB 2.0 и выше |
| Характеристики сканера - дальномера A1 | |
| Сканирование |
на 360° |
|
Расстояние сканирования |
12 метров |
| Частота измерения | 8000 Гц |
|
Частота адаптивного сканирования |
10 Гц |
|
Характеристики энкодера |
|
| Тип | фотоэлектрический кодер |
|
Разрешение |
500*30 (измеряется выходным валом редуктора) |
| Напряжение питания | 3.3 - 5 В |
| Тип интерфейса | XH2.54 |
| Характеристики двигателя | |
| Номинальное напряжение | 12 В |
| Номинальная мощность | 4.32 Вт |
| Ток | 2.8 А |
|
Номинальный крутящий момент |
10 кг*см |
|
Номинальная скорость |
11000 об/мин |
|
Передаточное число двигателя |
1:30 |
| Выходной вал | D-типа, 6 мм |
| Характеристики сервопривода | |
| Максимальный угол | 180° |
| Напряжение | 4.8 - 7.4 В |
| Крутящий момент |
15.3 кг*см (5 В), 20 кг/см (6.5 В) |
| Скорость реакции | 0.14 с / 60° |
| Тип сервопривода | цифровой |
| Механизм | металлический редуктор |
| Рабочая "мертвая зона" | 3 мкс |
| Вес | 59.6 г |
|
Характеристики батареи питания |
|
| Напряжение питания | 12 В |
| Емкость | 9800 мАч |
| Габариты | 99 х 62 х 29 мм |
| Интерфейс | Т-образный штекер |
| Вес | 0.36 кг |
| Общие характеристики | |
| Корпус | алюминиевый сплав |
| Время автономной работы |
при небольшой нагрузке (скорость 0.45 м/с) ∼ 4 часа, при нагрузке 1 кг (скорость 0.45 м/с) ∼ 2.5 часа |
| Габариты | 270 х 222 х 187 мм |
| Вес автомобиля | ~ 2.9 кг |
| Комплектация | |

|
Raspberry Pi 4B (4GB) – 1 шт |
 |
аккумулятор – 1 шт |

|
беспроводной контроллер PS2 – 1 шт |
 |
лидар – 1 шт |

|
двигатель MG513 - 4 шт |

|
колеса - 4 шт |
|
|
детали корпуса - 1 комплект |
|
|
маятниковый подвесной механизм - 1 набор |
|
|
металлическая фланцевая муфта - 4 шт |
|
|
крепежные элементы - 1 комплект |
|
|
кронштейн двигателя - 4 шт |
|
|
камера глубины - 1 шт |
|
|
гибкий механический коготь - 1 шт |
|
|
роботизированная рука - 1 шт |
|
|
зарядное устройство - 1 шт |
 Обратите внимание! Набор предполагает наличие у пользователя базовых навыков конструирования, программирования и отладки. Необходимые учебно-методические материалы по программированию робота размещены в разделе «ДОКУМЕНТАЦИЯ И ПО».
Обратите внимание! Набор предполагает наличие у пользователя базовых навыков конструирования, программирования и отладки. Необходимые учебно-методические материалы по программированию робота размещены в разделе «ДОКУМЕНТАЦИЯ И ПО».
Менеджеры по работе с клиентами не предоставляют консультации по программированию: набор предполагает самостоятельное программированием законченного устройства в целях развития и формирования у пользователя инженерного мышления и умений программирования робототехнических систем.

Технические характеристики, внешний вид и комплектация товара могут быть изменены производителем без предварительного уведомления.
Благодарственные письма
Посмотреть все




С этим товаром покупают
Для физических лиц при заказе от 3000 рублей Почтой России

Для физических лиц при заказе от 3000 рублей Почтой России

Для физических лиц при заказе от 3000 рублей Почтой России

Грузоподъёмность до 4 кг
Процессор: ARM Cortex-A72 1.5 ГГц
Оперативная память: 4 ГБ
Питание: аккумулятор 6000 мАч




отслеживать заказы
- Москва
- Санкт-Петербург
- Екатеринбург
- Новосибирск
- Краснодар
- Нижний Новгород
- Челябинск
- Пермь
- Воронеж
- Самара
- Казань
- Волгоград
- Ростов-на-Дону
- Саратов
- Тула
- Тюмень
- Уфа
- Абакан
- Архангельск
- Астрахань
- Барнаул
- Белгород
- Благовещенск
- Брянск
- Вологда
- Владивосток
- Владикавказ
- Владимир
- Волгоград
- Волгодонск
- Грозный
- Евпатория
- Иркутск
- Иваново
- Ижевск
- Йошкар-Ола
- Красноярск
- Калининград
- Кемерово
- Киров
- Кострома
- Кузнецк
- Курск
- Кызыл
- Липецк
- Майкоп
- Махачкала
- Мурманск
- Нальчик
- Нижний Тагил
- Новокузнецк
- Новороссийск
- Новый Уренгой
- Омск
- Оренбург
- Орёл
- Пенза
- Петрозаводск
- Петропавловск-Камчатский
- Псков
- Рязань
- Симферополь
- Саранск
- Саратов
- Севастополь
- Смоленск
- Сочи
- Ставрополь
- Стерлитамак
- Сургут
- Сыктывкар
- Тамбов
- Тверь
- Тольятти
- Томск
- Ульяновск
- Улан-Удэ
- Хабаровск
- Ханты-Мансийск
- Чебоксары
- Черкесск
- Чита
- Элиста
- Южно-Сахалинск
- Якутск
- Ярославль