Гибкий бионический манипулятор WHEELTEC MG546




 Доставка
Доставка
 Оплата
Оплата
 Для бизнеса
Для бизнеса
Характеристики WHEELTEC MG546
Общие данные
Основные характеристики
Общие характеристики
средний
инженерия и проектирование
интерес к наукам
логика и мышление
моторика и ловкость
навыки ведения проектов
программирование
робототехника
социально-эмоциональные навыки
схемотехника и электроника
творческое мышление
Описание WHEELTEC MG546
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ манипулятора WHEELTEC
| Характеристики манипулятора WHEELTEC | |
| Грузоподъемность | 500 г |
| Функциональные возможности | возможность захвата небольших предметов |
| Характеристики контроллера STM32 | |
|
Микроконтроллер |
STM32F103C8T6, ядро ARM Cotrex M3 |
| Максимальная частота |
72 МГц |
| Разрядность | 32 бита |
|
Объем памяти программ (FLASH) |
64/128 кБайт |
| Объем памяти, RAM |
20 кБайт |
|
Выводы |
37 |
|
Таймеры общего назначения |
3 |
|
Расширенный таймер с ШИМ управления двигателем |
1 |
|
Системный таймер |
1 |
|
Сторожевые таймеры |
2 |
|
UART |
3 |
|
SPI |
2 |
|
I2C |
2 |
|
CAN |
1 |
|
USB |
1 |
|
Контроллеры прямого доступа к памяти |
7 |
| АЦП |
2 АЦП, 10 каналов, время преобразования 1 мкс |
|
Часы реального времени |
есть |
|
Аппаратный модуль расчета CRC |
есть |
|
Напряжение питания микроконтроллера |
2 - 3.6 В |
|
Напряжение питания платы |
5 В |
|
Ток потребления |
до 50 мА |
| Температура | - 40 - 85°С |
| Общие характеристики | |
| Питание | DC 12 В, 5 А |
| Материал корпуса | алюминиевый сплав |
| Материал захвата | износостойкий, эластичный силикон |
| Вес | 3.58 кг |
| Комплектация | |
 |
контроллер STM32F405RG - 1 шт |
 |
адаптер питания - 1 шт |
 |
LV8731V модуль драйвера - 1 шт |
 |
OLED дисплей - 1 шт |
 |
адаптер 12 В, 5 А - 1 комплект |
|
|
кабель - 1 шт |
 Обратите внимание! Набор представляет собой конструктор и предполагает наличие у пользователя базовых навыков конструирования, программирования и отладки. Необходимые учебно-методические материалы по сборке и программированию робота размещены в разделе «ДОКУМЕНТАЦИЯ И ПО».
Обратите внимание! Набор представляет собой конструктор и предполагает наличие у пользователя базовых навыков конструирования, программирования и отладки. Необходимые учебно-методические материалы по сборке и программированию робота размещены в разделе «ДОКУМЕНТАЦИЯ И ПО».
Менеджеры по работе с клиентами не предоставляют консультации по программированию: набор предполагает самостоятельную сборку управляющего устройства на базе микроконтроллера и набора датчиков с последующим программированием законченного устройства в целях развития и формирования у пользователя инженерного мышления и умений программирования робототехнических систем.
Конструктор робот-манипулятор MG546 от WHEELTEC
В мире робототехники роботы-манипуляторы стали важной частью промышленности, медицины, а также других областей, требующих точного и гибкого манипулирования объектами. Гибкий робот-рука с силиконовым захватом WHEELTEC MG546 — передовое устройство этого типа, обладающее набором возможностей для применения профессионалами или энтузиастами в различных сферах. Бионический дизайн позволяет легко производить сложные манипуляции, такие как захват с перемещением предметов разной формы.
Особенности и возможности
Высокая гибкость
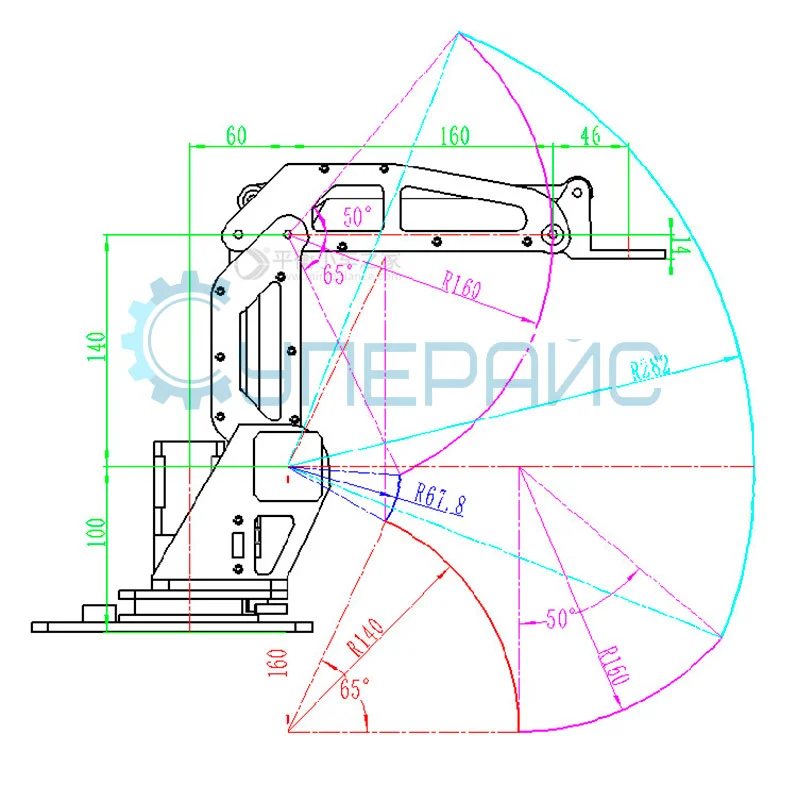
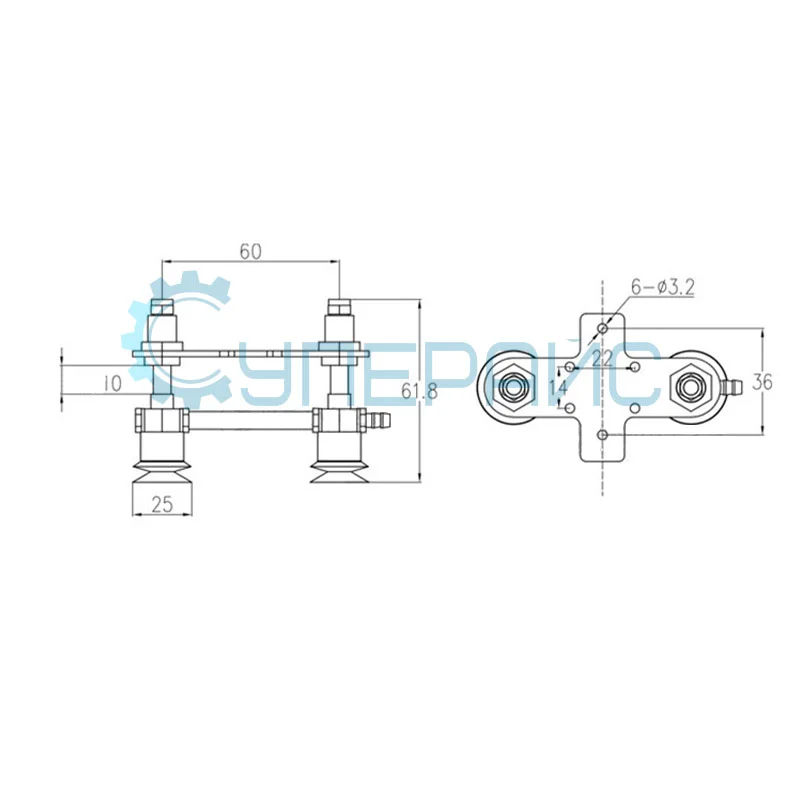
Бионический манипулятор MG546 обладает эластичным захватом из силикона, что позволяет ему приспосабливаться к различным задачам и условиям работы. Он способен манипулировать небольшими объектами различных форм и размеров весом до 500 г, обеспечивая их надёжный захват с удержанием. MG546 вдохновлён биологическими системами, имеет эргономичную структуру, схожую с анатомией человеческой руки. Благодаря этому манипулятор обладает невероятной точностью и гибкостью, что помогает эффективно справляться с возложенными на него задачами.
Точное позиционирование
Благодаря контроллеру STM32F405RG, манипулятор показывает высокую точность позиционирования. Он способен выполнять высокоточные манипуляции, что делает его оптимальным для задач, требовательных к точности позиционирования. С использованием STM32F405RG реализуют сложные алгоритмы управления, что позволяет WHEELTEC MG546 оперативно адаптироваться к различным условиям использования.
Гибкое программирование
Контроллер STM32 предоставляет массу возможностей для программирования и настройки устройства. Разработчикам легко создавать алгоритмы управления, адаптировать устройство под требуемые задачи, интегрировать его с другими системами. Контроллер обладает защитой от сбоев, что обеспечивает стабильную работу системы, предохраняя её от возможных ошибок. Он предоставляет инженерам большой выбор инструментов разработки, библиотек и драйверов. Это упрощает программирование устройства, позволяя адаптировать его под конкретные задачи.
Интеграция с внешними устройствами
Бионическая рука-манипулятор легко интегрируется с другими устройствами благодаря гибкости контроллера STM32. Он одновременно поддерживает протоколы связи и интерфейсы, такие как USB, UART, SPI, I2C и CAN, что обеспечивает совместимость с разными типами оборудования.
Лёгкость использования
Механическая рука оснащена LED-дисплеем для удобного считывания параметров работы. В комплект поставки конструктора входят механическая и электронная части для самостоятельной сборки.
Подвижный манипулятор WHEELTEC MG546 в форме механической руки с силиконовым захватом — эффективное решение в сфере робототехники. Он подходит для многих задач, включая промышленность, медицину, науку, а также другие области, где требуется точное гибкое манипулирование объектами.
Документация и ПО WHEELTEC MG546
Отзывы WHEELTEC MG546

Сотрудничаем с коммерческими организациями и государственными бюджетными учреждениями.
Работаем по прямому договору и участвуем во всех видах конкурентных процедур в рамках 44-ФЗ и
223-ФЗ. Оказываем помощь в составлении технического задания на оборудование.
Заполните форму и получите всю нужную информацию о выбранном оборудовании в виде коммерческого предложения:
- актуальные цены и сроки поставки;
- информация о скидке;
- наличие на наших складах.
С этим товаром покупают
Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Ранее просмотренные Вами
Для физических лиц при заказе от 5000 рублей Почтой России




Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Благодарственные письма