Всенаправленный робот WHEELTEC Omni-directional wheel version






 Доставка
Доставка
 Оплата
Оплата
 Для бизнеса
Для бизнеса
Характеристики WHEELTEC Omni-directional wheel version
Общие данные
Основные характеристики
Общие характеристики
Jetson Nano
обнаружение и объезд препятствий
умение отслеживать линии и движения по заданной траектории
выполнение команд дистанционно
передача изображения через приложение
автопилот
датчик линии
гироскоп
датчик цвета
лазерный лидар
камера глубины
Описание WHEELTEC Omni-directional wheel version
Технические характеристики WHEELTEC (всенаправленная версия)
| Среда разработки | Ubuntu18.04 |
| Грузоподъёмность | 3 кг |
| Максимальная скорость | 0,84 м/с |
| Привод | трехколесная всенаправленная версия |
| Колесо | диаметр 60 мм |
| Камера глубины | Astra Pro RGBD |
| Мотор | MG513 |
| Микроконтроллер | STM32F103VET6 |
| Лидар | N10 |
| Гироскоп | ICM20948 (9 осей) |
| Управление | мобильное приложение, беспроводной контроллер PS2, CAN |
| Особенности | движение в различных направлениях, дистанционное управление, передача изображения через приложение, восприятие местности 360°, автопилот, движение по заданной траектории, предотвращение столкновения |
| Характеристики платы Jetson Nano | |
| Процессор | Arm A57 с тактовой частотой 1,43 ГГц, 4 ядра |
| Видеокарта | Maxwell, 128 ядер |
| Системная память | 4 Гб LPDDR4, 64-bit 25,6 Гбит/с |
| Слот для карт памяти microSD | да |
| Кодирование видео |
4К с частотой 30 Гц 4 потока в разрешении 1080p с частотой 30 Гц 9 потоков в разрешении 720p с частотой 30 Гц (H.264 / H.265) |
| Декодирование видео |
4К с частотой 60 Гц 2 потока в разрешении 4K с частотой 30 Гц 8 потоков в разрешении 1080p с частотой 30 Гц 18 потоков в разрешении 720p с частотой 30 Гц (H.264 / H.265) |
| Камера | 2 полосы MIPI CSI-2 DPHY |
| Подключение | Gigabit Ethernet, M.2 Key E |
| Поддерживаемые интерфейсы | USB 3.0, USB 2.0 Micro-BHDMI, DP, GPIO, I2C, I2S, SPI, UART |
| Характеристики сканера - дальномера N10 | |
| Сканирование | на 360° |
| Расстояние сканирования | 25 метров |
| Разрешение угла | 0,8° |
| Частота измерения | 10 Гц |
| Частота дискретизации | 4500 Гц |
| Тип приводного двигателя | бесщеточный двигатель |
| Принцип работы | TOF |
| Характеристики камеры глубины Astra Pro | |
| Разрешение по глубине | 640 х 480 |
| Частота обновления и разрешение RGB | до 640 х 480, со скоростью 30 кадров в секунду |
| Угол поля зрения датчика RGB (горизонталь х вертикаль) | 66,1° х 40,2° |
| Угол обзора датчика глубины (горизонталь х вертикаль) | 58,4° х 45,5° |
| Базовая линия | ∼ 60 см |
| Диапазон глубины | 0,6 - 4 м |
| Габариты | 165 х 40 х 30 мм |
| Интерфейс передачи данных | USB 2.0 и выше |
| Характеристики мотора MG513 | |
| Номинальное напряжение | 12 В |
| Номинальная мощность | 4,32 Вт |
| Тип двигателя | двигатель на постоянных магнитах |
|
Момент остановки
|
10 кгФ. см
|
| Номинальный ток | 360 мА |
| Номинальный крутящий момент | 1 кгФ.см |
| Ток среза | 2,8 А |
| Передаточное число двигателя | 1:30 |
| Диаметр выходного вала | 6 мм |
| Скорость до замедления | 11000 об/мин |
| Скорость после замедления | 366 ± 10 об/мин |
|
Характеристики датчика угла поворота (энкодера) |
|
| Тип | фотоэлектрический энкодер |
| Разрешение | 500x30 (измерено на выходном валу редуктора) |
| Напряжение | 3,3 - 5 В |
| Тип интерфейса | XH2.54 |
| Общие характеристики | |
| Корпус | алюминиевый сплав |
| Питание | аккумулятор 9800 мАч с защитой от перезарядки, 12 В |
| Время работы |
5 ч (при лёгкой нагрузке и скорости 0,45 м/с) 3 ч (при нагрузке 1 кг и скорости 0,45 м/с) |
| Габариты изделия | 240 x 240 x 183 мм |
| Габариты упаковки | 350 х 350 х 370 мм |
| Вес брутто | 4,173 кг |
| Комплектация | |

|
плата Jetson Nano – 1 шт |

|
лидар – 1 шт |

|
беспроводной контроллер PS2 – 1 шт |
 |
аккумулятор 9800 мАч – 1 шт |

|
камера глубины Astra Pro RGBD – 1 шт |

|
мотор MG513 – 3 шт |
|
|
колеса - 3 шт |
|
|
нижняя пластина корпуса из алюминиевого сплава - 1 шт |
|
|
верхняя пластина корпуса из алюминиевого сплава - 1 шт |
|
|
детали для сборки - 1 комплект шт |
|
|
металлическая фланцевая муфта - 3 шт |
|
|
кронштейн двигателя - 3 шт |
 Обратите внимание! Набор предполагает наличие у пользователя базовых навыков конструирования, программирования и отладки. Необходимые учебно-методические материалы по программированию робота размещены в разделе «ДОКУМЕНТАЦИЯ И ПО».
Обратите внимание! Набор предполагает наличие у пользователя базовых навыков конструирования, программирования и отладки. Необходимые учебно-методические материалы по программированию робота размещены в разделе «ДОКУМЕНТАЦИЯ И ПО».
Менеджеры по работе с клиентами не предоставляют консультации по программированию: набор предполагает самостоятельное программированием законченного устройства в целях развития и формирования у пользователя инженерного мышления и умений программирования робототехнических систем.
Обзорная таблица роботов WHEELTEC
| Характеристики | Omni-directional wheel с сенсорным экраном | Робот на гусеничном шасси tracked vehicle ROS | Всенаправленный робот WHEELTEC Omni-directional wheel version |
| Среда разработки | Ubuntu18.04 | ||
| Максимальная скорость | 0,84 м/с | 1 м/с | 0,84 м/с |
| Грузоподъёмность | 3 кг | 4 кг | 3 кг |
| Привод | трехколесная всенаправленная версия | двухколесный гусеничный механизм (с независимой подвеской и амортизацией) | трехколесная всенаправленная версия |
| Камера глубины | Astra Pro RGBD | ||
| Мотор | MG513 | ||
| Управление | мобильное приложение, беспроводной контроллер PS2, CAN | ||
| Процессор | Arm A57 с тактовой частотой 1,43 ГГц, 4 ядра | ||
| Видеокарта | Maxwell, 128 ядер | ||
| Системная память | 4 Гб LPDDR4, 64-bit 25,6 Гбит/с | ||
| Слот для карт памяти microSD | да | ||
| Расстояние сканирования дальномера | 12 метров | 25 метров | |
| Сканирование дальномера | на 360° | ||
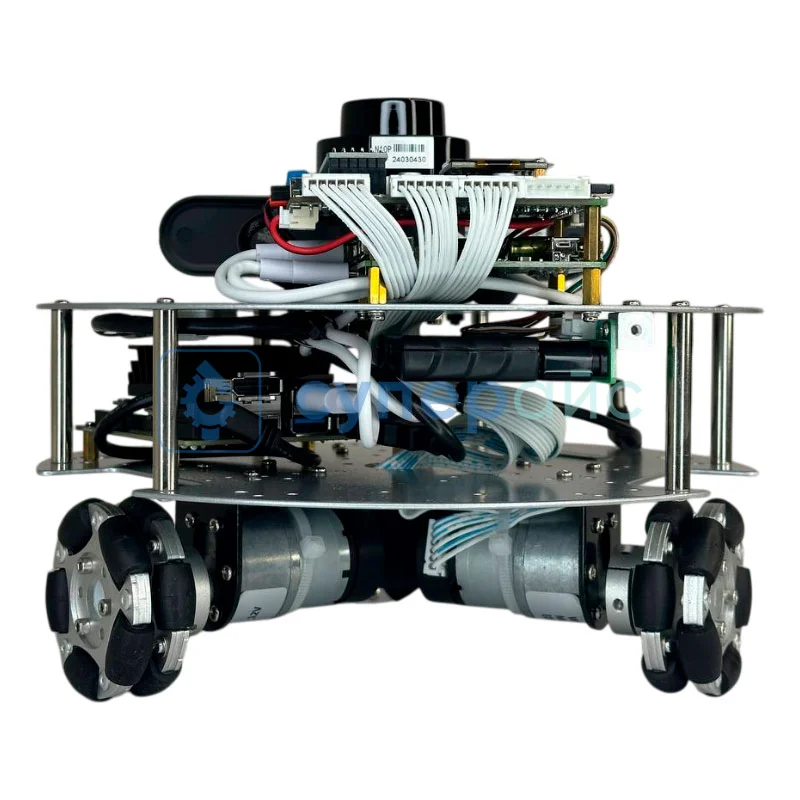
Робот с колёсами WHEELTEC Omni-directional wheel version
WHEELTEC Omni-directional wheel version – это собираемый автономный робот с колёсами всенаправленного движения.
Модель поддерживает свободное перемещение во всех направлениях. Если для самостоятельных проектов, обучения или в подарок нужен программируемый робот, набор явно заслуживает внимания.
Базовые характеристики:
- Всенаправленное шасси: робот может свободно перемещаться, что расширяет область возможного применения;
- Плата Jetson Nano (4 ГБ): мощные вычислительные возможности для обработки данных лидара и управления движением. Плата располагает интерфейсом, поддерживающим 9 разъемов;
- Двигатель на постоянных магнитах: обеспечивает плавное и стабильное движение, а также надёжность и надлежащий КПД;
- Сканирование лидара на 360°: позволяет машинному зрению создавать карту окружающего пространства, избегать препятствий и ориентироваться на местности;
- Функция движения по заданной траектории: можно задать маршрут с дальнейшим движением по обозначенному пути;
Среди особенностей модели – высокая маневренность: шасси помогает модели легко передвигаться в узких пространствах и выполнять сложные маневры. Лидар даёт точное определение местоположения, что важно для автономной работы и выполнения заданий.

Документация и ПО WHEELTEC Omni-directional wheel version
Отзывы WHEELTEC Omni-directional wheel version

Сотрудничаем с коммерческими организациями и государственными бюджетными учреждениями.
Работаем по прямому договору и участвуем во всех видах конкурентных процедур в рамках 44-ФЗ и
223-ФЗ. Оказываем помощь в составлении технического задания на оборудование.
Заполните форму и получите всю нужную информацию о выбранном оборудовании в виде коммерческого предложения:
- актуальные цены и сроки поставки;
- информация о скидке;
- наличие на наших складах.
С этим товаром покупают



Похожие товары
Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Ранее просмотренные Вами
Для физических лиц при заказе от 5000 рублей Почтой России

Благодарственные письма