Робот с сенсорным дисплеем Yahboom ROSMASTER X3 PLUS ROS Robot (без контроллера Jetson Nano)





 Доставка
Доставка
 Оплата
Оплата
 Для бизнеса
Для бизнеса
Характеристики ROSMASTER X3 PLUS ROS Robot
Общие данные
Основные характеристики
Общие характеристики
продвинутый
Посредством стандарта Wi-Fi из мобильного приложения со смартфона
обнаружение и объезд препятствий
нахождение выхода из лабиринта
движение за объектом
запись фото или видео
распознавание цвета
распознавание звука
распознавание лиц
выполнение команд дистанционно
захват и перемещение небольших предметов
отображение данных на встроенном дисплее
управление роботами с помощью движения руки и жестов
передача изображения через приложение
датчик линии
лазерный лидар
камера глубины
Описание ROSMASTER X3 PLUS ROS Robot
Технические характеристики Yahboom ROSMASTER X3 PLUS ROS Robot
| Особенности | передача видео в реальном времени, автопилот, отслеживание объектов, распознавание лиц, отслеживание цвета, обнаружение краёв и автоматическое избегание столкновения |
| Характеристики модуля голосового управления | |
| Модуль | CSK4002 |
| Количество микрофонов | 2 |
| Расстояние приема | 6 м |
| Чувствительность | -38 дБВ/Па |
| Напряжение | 5 В |
| Ток | 300 мА |
| Размер | 65 x 56 x 1,6 мм |
| Характеристики камеры Astra Pro Depth | |
| Точность | 1 м: ± 3 мм |
| Разрешение |
1280 x 1024 @ 7 fps 640 x 480 @ 30 fps 320 x 240 @ 30 fps 160 x 120 @ 30 fps |
| Чип обработки | MX400 |
| Поле зрения | H 58,4° x V 45,7° |
| Поле зрения RGB | H 66,10° x V 40,2° |
| Дальность | 0,6 - 8 м |
| Потребляемая мощность | < 2,5 Вт |
| Характеристики лидара | |
| Модель | YDLIDAR 4ROS |
| Сценарий работы | сканирование и позиционирование внутри помещений |
| Угловое разрешение |
0,09° при 5 Гц 0,13° при 7 Гц 0,22° при 12 Гц |
| Ток питания | 840 мА |
| Напряжение | 5 В |
| Потребление электроэнергии | 0,5 Вт |
| Радиус сканирования | 360° |
| Радиус измерения | 0,05 - 30 м |
| Частота сканирования | 5 - 12 Гц |
| Точность измерения |
≤ ± 6 см (0.05 - 5 м) ≤ ± 4 см (5 - 20 м) ≤ ± 10 см (20 - 30 м) |
| Степень защиты | IP65 |
| Размер | 75,8 x 70,3 x 34,7 мм |
| Характеристики манипулятора | |
| Точность | ±0,5 мм |
| Степени свободы | 5 DOF + захват |
| Скорость передачи данных в бодах | 115200 |
| Зажимной вес | 500 г |
| Ширина охвата | 350 мм |
| Максимальный угол | 300° ±15° |
| Напряжение | 6 - 7,4 В |
| Крутящий момент | 15 кг*5см + 6 кг*1 |
| Скорость реакции | 0,3 сек / 60° 7,4 В |
| Особенности | настройки сервопривода автоматически сохраняются после выключения питания, поддержка считывания положения сервопривода, статуса и другой информации |
| Тип сервопривода | сервопривод последовательной шины |
| Материал | анодированный алюминий |
| Вес | 50 г |
| Характеристики камеры на манипуляторе | |
| Разрешение | 480p (640*480) |
| Поле зрения | 110° |
| Частота кадров | 30 fps |
| Способ подключения | USB 2.0 |
| Метод фокусировки | ручная настройка |
| Характеристики мотора | |
| Тип мотора | щеточный, с постоянным магнитом |
| Напряжение | 12 В |
| Мощность | < 4 Вт |
| Ток | 0,3 А |
| Передаточное число двигателя | 1:30 |
| Крутящий момент при заблокированном роторе | 4,8 кг*см |
| Крутящий момент | 3,3 кг*см |
| Cкорость перед замедлением | 11000 об/мин |
| Скорость после замедления | 330 ±10 об/мин |
| Выходной вал | D-образный, 6 мм диаметр |
| Количество строк | 11 |
| Тип интерфейса | PH 2.0 |
| Характеристики батареи | |
| Емкость | 9600 мАч |
| Номинальный ток | 6 А |
| Максимальный ток | 10 А |
| Защита | от перегрузки, короткого замыкания |
| Размер | 64 x 43 x 75 мм |
| Вес | 450 г |
| Зарядное устройство | 12,6 В, 2 А |
| Штекер | t-образный + DC 4,0*1,7 |
| Общие характеристики | |
| Материал корпуса | алюминий |
| Питание | 9600 мАч (12,6 В) |
| Время работы | ~ 3,5 часа |
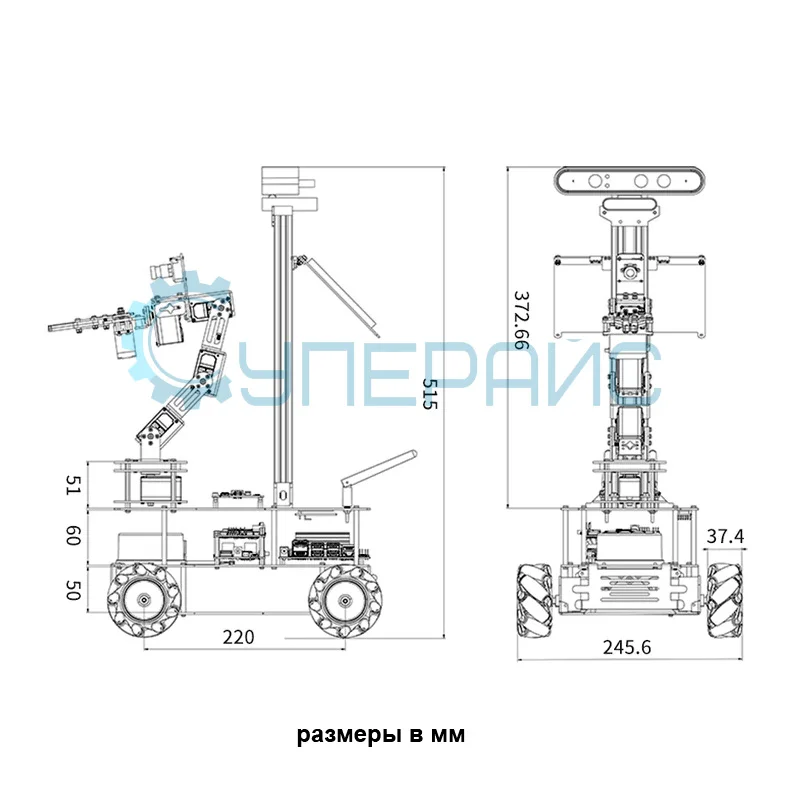
| Габариты | 180 x 172 x 210 мм |
| Вес брутто | 9,65 кг |
| Совместимость | Микрокомпьютер Jetson Nano 4GB Developer Kit (SUB) |
| Комплектация | |

|
плата управления – 1 шт |

|
модуль голосового управления - 1 шт |

|
мотор - 4 шт |

|
манипулятор - 1 шт |

|
аксессуары к контроллеру - 1 шт |

|
флеш-накопитель 64 Гб с ОС для робота - 1 шт |

|
лидар - 1 шт |

|
камера глубины Astra Pro Depth - 1 шт |

|
противоударный бампер - 1 шт |
 |
джойстик - 1 шт |

|
держатель для мобильного телефона - 1 шт |

|
аккумуляторная батарея – 1 шт |
 |
зарядное устройство - 1 шт |
 |
кабельный хомут – 1 шт |
 |
отвертка – 1 шт |

|
шасси - 1 шт |
|
|
кронштейн маятника - 1 шт |
|
|
колесо - 4 шт |
|
|
комплект деталей - 1 шт |
|
|
плата USB HUB - 1 шт |
|
|
USB камера - 1 шт |
|
|
световая панель - 1 шт |
|
|
крепление для лидара - 1 шт |
|
|
кабели – 1 комплект |
|
|
oled экран - 1 шт |
|
|
сенсорный дисплей 7" - 1 шт |
|
|
крепление для сенсорного дисплея - 1 шт |

|
упаковочная коробка - 1 шт |
Обратите внимание: плата Jetson Nano в комплект не входит.
Обзорная таблица роботов Yahboom
| Характеристики | Робот-конструктор Yahboom ROSMASTER X3 Superior-RPi ROS Robot (без контроллера Raspberry Pi 4B) | Робот с сенсорным дисплеем Yahboom ROSMASTER X3 PLUS ROS Robot (без контроллера Jetson Nano) |
| Среда разработки | Ubuntu 18.04 LTS + ROS Melodic | |
| Количество микрофонов | 2 | |
| Голосовой модуль | YB-4001 | CSK4002 |
| Привод | четырёхколёсная версия | |
| Камера | Astra Pro Depth | |
| Мотор | щеточный, с постоянным магнитом | |
| Управление | мобильное приложение, ПК, джойстик | |
| Лидар | RPLIDAR S2L | YDLIDAR 4ROS |
| Видеокарта | Broadcom VideoCore VI @ 500 МГц | Maxwell, 128 ядер |
| Ёмкость батареи | 6000 мАч | 9600 мАч |
| Расстояние сканирования дальномера | 0.6 - 8 м | |
| Сканирование дальномера | на 360° | |
| Материал корпуса | алюминий | |
Набор для сборки Yahboom ROSMASTER X3 PLUS ROS
Робот с сенсорным дисплеем Yahboom ROSMASTER X3 PLUS представляет собой «умное» устройство, наделённое основным функционалом, которым располагают современные сенсорные роботы. Оснащенный аккумулятором на 9600 мАч, робот может функционировать продолжительное время. Управление происходит с помощью приложения и джойстика, что обеспечивает удобное взаимодействие. Сканирование лидара на 360 градусов помогает роботу ориентироваться в пространстве, а меканум-колеса дают маневренность в ограниченных пространствах. Сенсорный дисплей используется для отображения информации и управления функциями робота. Экран позволяет получать данные в реальном времени, включая видеопоток, что существенно расширяет возможности взаимодействия.
Среди особенностей, которыми обладают такие роботы, управление жестами и голосом. Камера, встроенная в манипулятор, помогает в распознавании лиц и отслеживании объектов. Робот способен обнаруживать края и автоматически избегать столкновения. Сенсорный интерфейс упрощает настройку модели, помогая быстро получить доступ к нужным параметрам.
Эта модель полезна в образовательных учреждениях, исследовательских лабораториях, а также подходит для развлекательных целей. Такие сенсорные роботы применяются для обучения основам робототехники и программирования. Способность отслеживания цвета добавляет модели функциональность, позволяя выполнять сложные задачи в различных областях.

Документация и ПО ROSMASTER X3 PLUS ROS Robot
Отзывы ROSMASTER X3 PLUS ROS Robot

Сотрудничаем с коммерческими организациями и государственными бюджетными учреждениями.
Работаем по прямому договору и участвуем во всех видах конкурентных процедур в рамках 44-ФЗ и
223-ФЗ. Оказываем помощь в составлении технического задания на оборудование.
Заполните форму и получите всю нужную информацию о выбранном оборудовании в виде коммерческого предложения:
- актуальные цены и сроки поставки;
- информация о скидке;
- наличие на наших складах.
С этим товаром покупают



Для физических лиц при заказе от 5000 рублей Почтой России

Похожие товары
Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Ранее просмотренные Вами
Для физических лиц при заказе от 5000 рублей Почтой России

Благодарственные письма