Управление движением: всё что нужно знать о сервоприводах



 124K
124K Сервоприводы - технологическое решение для повышения эффективности и точности работы оборудования. Они помогают плавно управлять движением и положением механизмов, что необходимо в автомобильной, робототехнической, медицинской и других отраслях. Сервомоторы помогают в автоматизации и роботизации производства и важны для создания промышленных роботов и мехатронных систем.
С помощью сервомоторов возможно решить широкий круг задач - от простых бытовых до сложных индустриальных. А развитие технологий сервоприводов только расширяет возможности их использования.
Материал обновлен 03.05.2023
![]() Время чтения: 16 минут
Время чтения: 16 минут
- Определение сервомотора
- Устройство
- Принцип работы
- Типы и виды
- По типу двигателя
- По роду тока
- По конструкции
- По функции
- По способу обработки сигнала
- По виду редуктора
- Характеристики
- Отличие сервопривода от шагового двигателя
- Подключение
- Управление
- Сравнение популярных моделей
- Применение
Что такое сервомотор?
Сервопривод – это электрический двигатель, движением вала которого можно управлять с высокой точностью. Можно поворачивать вал привода на любой требуемый угол, а также задавать необходимую скорость его вращения.

Сервоприводы в робототехнике они помогают моделировать различные движения роботов. Сервоприводы – эффективно перемещают механизмы в пространстве. Это устройство идеально подходит для точных перемещений и позиционирования.
Устройство сервопривода
Если говорить об основных элементах сервопривода, то он состоит из блока управления, мотора и датчика. Современные редуктора обеспечивают стабильную работу даже при переменных нагрузках.
Управление происходит через печатную плату, к которой подключен мотор постоянного тока и потенциометр (датчик). Внутри блока управления также находятся шестерни редуктора.

Фактически сам привод - это электрический мотор с редуктором. Электромотор преобразует электричество в механическое действие. Но скорость вращения мотора не всегда соответствует нужной, потому что двигатель вращается слишком быстро. Поэтому для понижения скорости используютредуктор. Он также увеличивает крутящий момент на валу. При выборе сервомотора важно учитывать тип редуктора, так как он влияет на общий крутящий момент.
Потенциометр используется для контроля положения вала.
Из сервопривода выходят три провода. Два из них питают мотор, третий провод используется для подачи управляющего сигнала.

Принцип работы сервопривода
При включении электромотора запускается вращение выходного вала. К нему можно подключить или присоединить то, чем в дальнейшем планируется управлять.
Работа с серводвигателями требует точной настройки управляющих сигналов. Для управления сервоприводом необходим импульсный сигнал. Длительность импульсов определяет на какой угол нужно повернуть вал. Текущее положение вала определяется по текущей величине сопротивления потенциометра. Управляющая электроника сравнивает принятый сигнал и сопротивление. В случае расхождения электроника подает питание на мотор поворачивая вал в нужную сторону. Управляющий блок стремится достичь и поддержать такое сопротивление на потенциометре, которое максимально соответствовало бы значению угла, заданного поступающим сигналом.
Типы и виды сервоприводов
Сервоприводы применяются в управлении миниатюрными устройствами, например, дронами и любительскими робототехническими устройствами. Их можно встретить и в силовой технике: промышленные роботы, управление силовыми вентилями и заслонками в нефтяной, газовой промышленности, а также других силовых механизмах. Такое решение находит применение как в бытовой, так и в промышленной технике.
По типу используемого двигателя
Cервомоторы делятся на синхронные и асинхронные. Синхронные обеспечивают высокую точность и контроль управления. Асинхронные имеют высокую мощность на рабочем валу. Они производятся только для переменного тока.
По роду тока
Моторы переменного или постоянного тока. Моторы переменного тока имеют большую мощность. Поэтому их применяют в управлении силовыми агрегатами. Моторы постоянного тока компактной конструкции и с малым весом. Они созданы для работы в автономных механизмах.
По виду конструкции
Выделяют три вида сервомоторов: коллекторные (Brush motor), коллекторные без сердечника (Coreless motor) и бесколлекторные (Brushless motor).
Коллекторные
Коллекторные – имеют якорь из обмоток проволоки, который вращается в магнитном поле постоянных магнитов. Для подачи тока на обмотку якоря используют коллекторное кольцо и щеточный механизм.
Коллекторные без сердечника
Коллекторные без сердечника - с облегченной конструкцией, за счет отсутствия железа в магнитопроводе. Это позволяет уменьшить размер мотора и снизить момент инерции на валу. Поэтому такие моторы называют еще малоинерционными. Компактные редуктора с металлическими шестернями отличаются высокой износостойкостью.
Бесколлекторные
Бесколлекторные - имеют обратную коллекторным машинам конструкцию. Магнит помещен на ось вращения (ротор), а обмотки вынесены в статор. В конструкции отказались от коллекторного узла, что значительно уменьшило размеры мотора.
По выполняемой функции
Сервомоторы делятся на удерживающие заданный угол и постоянного вращения.
Удержание угла
Приводы с удержанием угла приводят механизмы в требуемое положение. Их применяют при конструировании роботов, управлении заслонками, шаровыми кранами, замками и иными механизмами. Диапазон вращения - основная характеристика сервоприводов с удержанием угла.
Постоянное вращение
Приводы постоянного вращения перемещают объекты на протяженные расстояния и многократно вращают. Механизмы, в которых используют такие приводы, это лазерные и гравировальные станки, а также другие ЧПУ-устройства. Основная характеристика приводов - момент инерции.
По способу обработки сигнала
Сервоприводы бывают цифровые и аналоговые.
Внешне они почти не отличаются друг от друга. Основное отличие – в принципе управления мотором. Аналоговыми сервомоторами управляют микросхемой, цифровыми – микропроцессором. Микросхема и микропроцессор принимают и анализируют управляющие импульсы. Только на микросхему они обычно поступают с частотой 50 Гц, а на микропроцессор – с частотой 200 Гц и более. В результате этого цифровой сервомотор быстрее и четче реагирует на управляющий сигнал. Новая серия сервоприводов сочетает компактность с высокой мощностью. В многоосевых системах могут использоваться редуктора разного типа для каждой оси. При высокой нагрузке рекомендуется использовать червячный редуктор из-за его надёжности.

Цифровые сервомоторы – это новый шаг в развитии техники. Для них характерны:
- высокая точность позиционирования;
- быстрое управление приводом;
- поддержание постоянного крутящего момента.
По виду редуктора
В сервомоторах часто используют многоступенчатый цилиндрический редуктор. Это несколько параллельно стоящих шестерней. Такая конструкция проста и дешева в производстве. Однако при большом обратном усилии на валу шестерни могут провернуться в обратную сторону. Использование усиленного редуктора позволяет увеличить срок службы всего привода.
Когда положение вала должно оставаться неизменным при любой нагрузке используют приводы с червячным редуктором.

Основные технические характеристики сервопривода
Крутящий момент (усилие на валу)
Он означает произведение силы на длину рычага. Момент измеряется в кг*см. Крутящий момент отвечает за ускорение выходного вала, а также его способность преодолевать сопротивление вращению. Чем выше крутящий момент, тем больше возможностей у мотора реализовать свой потенциал.
Скорость поворота
Это характеристика показывает скорость, с которой выходной вал сервопривода меняет свое положение. Обычно она указывается как отношение времени поворота к углу, например, 60 градусов за 0,09 сек. На скорость поворота влияет напряжение питания. Поэтому она указывается для нескольких значений напряжений.
Угол поворота
Это максимальный угол, на который может повернуться выходной вал. Модели бывают со значением угла поворота в 120°, 180°, 270°, 360° и другими.
Габариты сервопривода
Сервоприводы бывают маленькие, стандартные и большие. Из-за того, что нет единого стандарта, то обычно их размеры до 40х20х40 мм.
Материал шестерней
Шестерни редуктора состоят из пластика, карбона или металла. Пластиковые шестерни легкие, но не предназначены для серьезных нагрузок. Карбоновые шестерни более прочные, но и более дорогие. Металлические шестерни – самые тяжелые и используются для работы на максимальных нагрузках.

Отличие сервопривода от шагового двигателя
Шаговый двигатель и сервопривод различаются как конструктивно, так и способом управления.
Шаговый двигатель – это многообмоточная электрическая машина. Вращение его ротора осуществляется подачей питания на обмотки статора. Двигатель имеет фиксированное число шагов. Это ограничивает точность выставления заданного угла
У шагового двигателя часто нет обратной связи. Это приводит к пропуску шагов при больших нагрузках или скоростях.
Подробнее о шаговых двигателях вы можете узнать в статье: «Что такое шаговый двигатель и как им управлять».
Подключение сервопривода
Для достижения целей робототехники к программируемому контроллеру Arduino может быть подключен сервопривод. Подключение осуществляеют через кабели, которые выходят из сервопривода. Обычно они окрашены в различные цвета: красный; коричневый или черный; желтый, оранжевый или белый.

Красный провод отвечает за подачу питания. Коричневый - за присоединение к заземлению. Желтый – для передачи управляющего сигнала. Подключение привода к Arduino УНО, STM32 или иной управляющей плате производится через ШИМ-выводы.

В схеме, черный провод подключается к любому GND-пину. Красный провод питания - к выводу для подключения питания (5V). Белый сигнальный кабель – к ШИМ-выводу.
Питание
Большинство плат Arduino рассчитано на токи до 500 мА. Сервопривод достаточно энергоемкий компонент, так как потребляет более 100 мА. Если в проекте требуется использовать мощный сервопривод или нескольких устройств, то нужно позаботиться об их дополнительном питании. Проблема дополнительного питания сервоприводов может быть решена так:
- Обеспечить питание сервопривода от дополнительно блока питания, например, на 5 или 6 В;
- Использовать аккумулятор или батарейки.
Напрямую к Arduino можно подключать только маломощный сервопривод, иначе пользователя ожидают разные побочные эффекты: от перезагрузки платы до перегорания отдельных компонентов.
Количество
Количество подключаемых к плате Arduino сервоприводов ограничено. Большинство моделей Arduino предусматривает подключение 12 устройств, но к Arduino Mega можно подключить до 48 приводов.

Управление сервоприводом
Библиотека Servo
Библиотека для сервопривода содержит набор дополнительных команд, позволяющих написать программу в упрощенном виде.
Уже созданы программы для разных целей. Необходимые библиотеки можно посмотреть по ссылке: https://www.arduino.cc/reference/en/libraries/.
На платах Arduino за исключением модели Arduino Mega обращение к библиотеке отключает функцию analogWrite (PWM) на пинах 9 и 10. Подключен сервопривод или нет при этом роли не играет. На платах Arduino Mega можно подключить до 12 сервомоторов без отключения функции PWM.
#include
Servo myservo; // создаем объект класса Servo
void setup() {
myservo.attach(9); // устанавливаем привод на пин 9
}
void loop() {
myservo.write(90); // поворачиваем сервомотор на угол 90 градусов
delay(1000); // ждем одну секунду
myservo.write(0); // поворачиваем сервомотор на угол 0 градусов
delay(1000); // ждем одну секунду
}

Библиотека Servo.h подключается командой #include. После её подключения возможно пользоваться списком, содержащихся в ней функций. Функции библиотеки можно изучить через меню «Файл/примеры». Для каждого сервопривода создается свой «объект» (servo), который прикрепляется к цифровому пину. После программируемый контроллер Arduino готов отправлять управляющие сигналы на конкретный сервопривод. Передача сигналов выполняется постоянно, даже при «простое» сервопривода. Для приостановки передачи сигналов нужно отправить команду вручную.
Управляющий сигнал
Для управления сервоприводом управляющий сигнал имеет существенное значение. Это импульс с нужной шириной и посылаемый с соответствующей частотой. Ширину импульса можно установить в программном коде вручную, методом подбора достигнув точного угла, или использовать команды библиотеки, указывая нужный угол в градусах. У разных марки приводов ширина импульса для поворота выходного вала на определенный угол может различаться.
Импульсы отвечают, как за движение сервомотора, так и за его неподвижное положение. Работа привода происходит по циклично посылаемым импульсам.
Управляющие команды
Управление сервоприводом через библиотеку основано на следующих командах:
- attach() — позволяет подключить сервопривод к пину;
- write() — на пин поступают значения для управления им;
- writeMicroseconds() — позволяет управлять сервоприводом путем передачи на него значений в микросекундах;
- read() — считывает значение текущего положения сервопривода;
- attached() — контролирует подключение сервопривода к пину;
- detach() — отключает сервопривод от конкретного пина.
Возникающие сложности
Если в работе сервопривода возникают нарушения, то об этом говорят шумы: жужжание, потрескивание и прочее. Ниже рассмотрим основные причины таких шумов.
Невозможность поворота на заданный угол
Бывают случаи, когда поворот сервопривода на заданный угол невозможен. Например, на его пути возникает преграда. Этой преградой становится закрепленное на приводе устройство или его часть. Упираясь в преграду, сервопривод начинает характерно жужжать. Чтобы решить проблему, в программу вносятся команды, ограничивающие перемещение привода путем изменения угла перемещения.
Настройки начальной и конечной позиции
Иногда нужно подкорректировать координаты начальной или конечной позиции. Это нужно, когда значения датчика и фактического положения выходного вала расходятся относительно конечной позиции последнего. Например, выходной вал размещен в конечной позиции, но датчик считает, что он еще ее не достиг и пытается заставить выходной вал продолжить движение. Возникает характерный шум. Начальная позиция не обязательно должна начинаться с 0°С, а конечная заканчиваться на 180°C. Эти предельные значения можно немного сдвинуть на 5…10°C, и проблема будет решена.
Сравнение популярных моделей
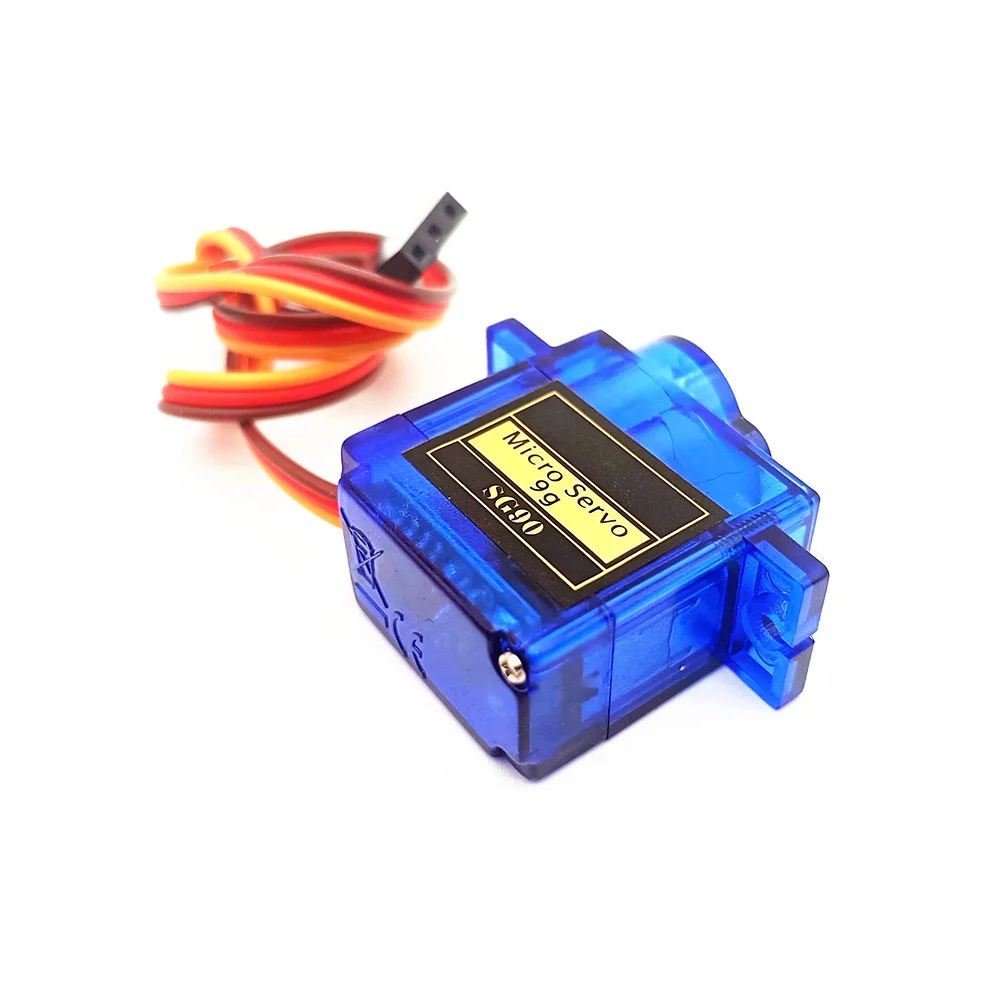
Сравним четыре модели сервомоторов: SG90, MG995, MG996R И MG90S. Все они относятся к бюджетной категории, имеют ряд существенных различий.
| SG90 | MG90S | MG995 | MG996R | |
|---|---|---|---|---|
|

|

|

|
|
| Тип | Аналоговый | Цифровой | Цифровой | Цифровой |
| Габариты, мм | 23 x 12,2 x 29 | 22,8 x 12,2 x 28,5 | 40,7 x 19,7 x 42,9 | 22,8 x 12,2 x 28,5 |
| Рабочее напряжение, В | 3,5…6,0 | 4,8…6,6 | 4,8…7,2 | 4,8…7,2 |
| Угол поворота, град. | 360 | 180 | 180 | 180 |
| Крутящий момент, кг*с | 1,6 | 1,8 | 8,5 | 9,4 |
| Скорость вращения, сек/60 град. | 0,12 | 0,08 | 0,16 | 0,15 |
| Материал шестерни | Пластик | Металл | Металл | Металл |
Модель SG90 применима во многих проектов: она дешевле и с большим углом поворота. Однако малый крутящий момент и пластиковые шестерни подходят для маломощных проектов. MG90S обладает преимуществом перед SG90 – это металлические шестерни и повышенная скорость вращения. Износостойкость шестерней выше, но крутящий момент не значительно стал выше.
Для серьёзных проектов, требующих больших усилий, предпочтительнее сервомоторы MG995 и MG996R или более дорогие модели. Они создают большие усилия на валу, имеют большую прочность и износостойкость.
Применение
Сервоприводы малой мощности используют в областях:
- Моделизм. Здесь их используют в радиоуправляемых моделях для управления рулевым управлением, газом и тормозом.
- Автомобильная промышленность. Управляемые приводы используются в автомобилях для управления зеркалами, окнами, дверями и другими устройствами.
- Робототехника. Управление движениями роботов, механизмов и других элементов.
- Медицинская техника. Приводы применимы в медицинском оборудовании, для точного управления движением подвижными элементами оборудования и инструментов.
- Промышленные автоматизированные системы. Здесь они применимы для управления движением элементов: конвейеров, роботов-манипуляторов и иного оборудования.
- Электроника и робототехника для дома. Сервомоторы постоянного тока используются в устройствах для дома: в роботах-пылесосах, игрушках, устройствах для управления бытовой технике.
Это некоторые примеры применения сервоприводов. Их использование намного шире и зависит от конкретных задач, которые нужно решить.
Сервопривод – это необходимый элемент в робототехнике, с помощью которого воплощаются многие творческие проекты. Этот умный управляемый моторчик служит для моделирования движения. Пользоваться его функциями не сложно, уже написано много программ, которые могут быть использованы в качестве основы для воплощения собственных идей. Сервопривод может быть подключен к любому программируемому контроллеру, например, Arduino, ESP32 или Raspberry.
Если в готовы сделать первые шаги по знакомству с управлением роботом или созданию автоматического устройства, то предлагаем познакомиться с нашей статьёй «Какой набор Ардуино выбрать: ТОП-10 наборов для быстрого старта».
206
196
377







