Робот-платформа с манипулятором на шасси MeArm
Код товара: 3049
 Гарантия 3 месяца
Гарантия 3 месяца










 О товаре
О товаре  Робот-манипулятор на шасси MeArm с контроллером UNO R3 и средой разработки Arduino IDE. Беспроводное управление и питание от двух батарей 3,7 В
Робот-манипулятор на шасси MeArm с контроллером UNO R3 и средой разработки Arduino IDE. Беспроводное управление и питание от двух батарей 3,7 В 
 Доставка
Доставка
Транспортной компанией по РФ и СНГ
Курьером по Москве
Самовывоз из магазина
 Оплата
Оплата
Для юрлиц – переводом на расчётный счёт
Для физлиц – банковской картой онлайн, наложенным платежом и наличными
 Для
бизнеса
Для
бизнеса
Аккредитованы на ЭТП
Участвуем в госзакупках по 223-ФЗ и 44-ФЗ
Оказываем помощь в разработке ТЗ
О товаре Робот-манипулятор на шасси MeArm с контроллером UNO R3 и средой разработки Arduino IDE. Беспроводное управление и питание от двух батарей 3,7 В Технические характеристики манипулятора на шасси MeArm
| Управление | управление автомобилем через среду программирования Arduino, управление при помощи джойстика |
| Программирование | среда разработки Arduino IDE |
| Управление двигателем | драйвер моторов L293D |
| Передаточное число двигателя | 1:48 |
| Стабилизатор напряжения | 7805 |
| Функциональные возможности | захват и перемещение различных небольших предметов |
| Характеристики контроллера UNO R3 | |
| Микроконтроллер | ATmega328 |
| Рабочее напряжение | 5 В |
| Входное напряжение (рекомендуемое) | 7-12 В |
| Входное напряжение (предельное) | 6-20 В |
| Цифровые входы/выходы | 14 (6 из которых могут использоваться как выходы ШИМ) |
| Аналоговые входы | 6 |
| Постоянный ток через вход/выход | 40 мА |
| Постоянный ток для вывода 3.3 В | 50 мА |
| Флеш-память | 32 Кб (ATmega328) из которых 0.5 Кб используются для загрузчика |
| ОЗУ | 2 Кб (ATmega328) |
| EEPROM | 1 Кб (ATmega328) |
| Тактовая частота | 16 МГц |
| Характеристики сервопривода SG90 | |
| Напряжение питания | 3.5 - 6 В |
| Скорость без нагрузки |
0.12 с/60° (4.8 В), 0.10 с/60° (6 В) |
| Вращающий момент при заторможенном роторе |
1.5 кг/см (4.8 В) 1.7 кг/см (6 В) |
| Рабочая "мертвая зона" | 5 мкс |
| Рабочая температура | - 30 ∼ + 60°С |
| Вес брутто | 1,347 кг |
| Общие характеристики | |
| Питание | две литий-ионных батареи 3.7 В |
| Время работы от заряженного аккумулятора | ∼ 30 мин |
| Габариты | 250 x 250 x 150 мм |
| Вес | 1.5 кг |
| Комплектация: | |

|
плата UNO R3 (Arduino-совместимый контроллер) – 1 шт |

|
USB кабель – 1 шт |
.jpg)
|
сервопривод Tower Pro MG90S – 4 шт |
.jpg)
|
совместимый с Arduino motor shield – 1 шт |

|
платформа машинки – 1 шт |

|
крепежный набор – 1 шт |

|
соединительные провода 4P (мама-мама) 20 см – 1 шт |
|
|
соединительные провода 5P (папа-мама) 25 см P – 1 шт |

|
адаптер для батареек – 1 шт |

|
крепеж мотора – 8 шт |
.jpg)
|
набор деталей из прозрачного акрила для сборки механического манипулятора – 1 шт |

|
колесо – 4 шт |

|
мотор – 4 шт |
.jpg)
|
вольтметр – 1 шт |

|
литий-ионный аккумулятор 18650 – 2 шт |
.jpg)
|
джойстик PS2 с адаптером – 1 шт |
.jpg)
|
зарядное устройство – 1 шт |

|
отвертка – 1 шт |

|
хомут – 5 шт |
Конструктор для сборки колесной платформы с захватом типа «робо-рука» MeArm
Робот-платформа MeArm — это автономный робот манипулятор с колесами, который может захватывать и перемещать предметы, что делает его идеальным для проектов в области робототехники и автоматизации. Устройство управляется с помощью геймпада PS2 или через среду разработки Arduino IDE, предлагая гибкость в программировании и настройке.
Основой робота является Arduino-совместимый контроллер UNO R3, работающий на микроконтроллере ATmega328, который поддерживает до 14 цифровых входов/выходов, из которых 6 могут использоваться для ШИМ.
Контроллер обеспечивает плавное и точное управление движением, а его тактовая частота в 16 МГц и флеш-память на 32 КБ позволяют запускать сложные программы.
Для движения робот использует четырехколесное шасси, приводимое в действие мотором с передаточным числом 1:48. Управление моторами осуществляется с помощью драйвера L293D, который обеспечивает надежную работу в различных условиях.
Сервоприводы SG90 контролируют движение манипулятора, который может захватывать и перемещать небольшие объекты. Питается система от двух литий-ионных батарей 3.7 В, что обеспечивает до 30 минут автономной работы.
Робот поддерживает работу в диапазоне напряжений 6 до 20 В, что делает его адаптивным к разным источникам питания. Компактные размеры (250 x 250 x 150 мм) и вес в 1.5 кг делают эту платформу удобной для использования в домашних и учебных проектах.
Кран-манипулятор на шасси поставляется с полной комплектацией, включающей 4 мотора, 4 колеса, геймпад PS2, USB-кабель, а также все необходимые детали для сборки автономного робота.

 Обратите внимание! Набор представляет собой конструктор и предполагает наличие у пользователя базовых навыков конструирования, программирования и отладки. Необходимые учебно-методические материалы по сборке и программированию робота размещены в разделе «ДОКУМЕНТАЦИЯ И ПО».
Обратите внимание! Набор представляет собой конструктор и предполагает наличие у пользователя базовых навыков конструирования, программирования и отладки. Необходимые учебно-методические материалы по сборке и программированию робота размещены в разделе «ДОКУМЕНТАЦИЯ И ПО».
Менеджеры по работе с клиентами не предоставляют консультации по программированию: набор предполагает самостоятельную сборку управляющего устройства на базе микроконтроллера и набора датчиков с последующим программированием законченного устройства в целях развития и формирования у пользователя инженерного мышления и умений программирования робототехнических систем.

Технические характеристики, внешний вид и комплектация товара могут быть изменены производителем без предварительного уведомления.
Благодарственные письма
Посмотреть все

С этим товаром покупают

Количество предметов: 16 шт
Совместимость: Arduino, Raspberry Pi, STM32 и др.
Для физических лиц при заказе от 3000 рублей Почтой России
 Конструктор для сбора робота DIY с контроллером UNO R3 и средой разработки Arduino IDE. Дистанционное управление с помощью джойстика и питание от 2 аккумуляторов 18650
Конструктор для сбора робота DIY с контроллером UNO R3 и средой разработки Arduino IDE. Дистанционное управление с помощью джойстика и питание от 2 аккумуляторов 18650

Для физических лиц при заказе от 3000 рублей Почтой России

Двигатель 12V330RPM
Максимальная нагрузка: ARM Cortex-A72 1,5 ГГц
Материал корпуса: алюминиевый сплав
Ширина дорожки: 40 мм
Похожие товары
Для физических лиц при заказе от 3000 рублей Почтой России
 Робот-рука Youzhihui Robotic Arm с контроллером Arduino UNO R3 и средой разработки Arduino IDE. Запись и воспроизведение действий, питание DC 6 - 12 В
Робот-рука Youzhihui Robotic Arm с контроллером Arduino UNO R3 и средой разработки Arduino IDE. Запись и воспроизведение действий, питание DC 6 - 12 В
Для физических лиц при заказе от 3000 рублей Почтой России
 Робот Keyes 4WD Mecanum Robot с контроллером Keyes PLUS и средой разработки Arduino IDE, Scratch, Mixly. Функция патрулирования и УЗ датчик. Язык программирования C++ и Scratch
Робот Keyes 4WD Mecanum Robot с контроллером Keyes PLUS и средой разработки Arduino IDE, Scratch, Mixly. Функция патрулирования и УЗ датчик. Язык программирования C++ и Scratch
Для физических лиц при заказе от 3000 рублей Почтой России
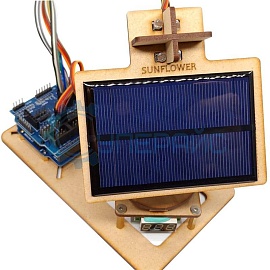 Солнечный трекер MOEBIUS MBS-207 с контроллером Arduino Uno. 4 датчика-фоторезистора и питание 7 - 12 В
Солнечный трекер MOEBIUS MBS-207 с контроллером Arduino Uno. 4 датчика-фоторезистора и питание 7 - 12 В
Для физических лиц при заказе от 3000 рублей Почтой России
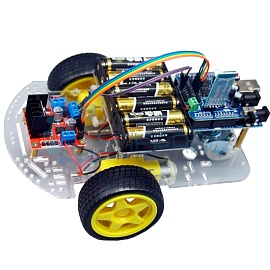 Двухколесный робот RoboCar-3 с контроллером ZYduino UNO R3 и средой разработки Arduino IDE. Дистанционное управление Bluetooth и питание 3,7 В
Двухколесный робот RoboCar-3 с контроллером ZYduino UNO R3 и средой разработки Arduino IDE. Дистанционное управление Bluetooth и питание 3,7 В
Сотрудничаем с коммерческими организациями и государственными бюджетными учреждениями.
Работаем по прямому договору и участвуем во всех видах конкурентных процедур в рамках 44-ФЗ и
223-ФЗ. Оказываем помощь в составлении технического задания на оборудование.
Заполните форму и получите всю нужную информацию о выбранном оборудовании в виде коммерческого предложения:
- актуальные цены и сроки поставки;
- информация о скидке;
- наличие на наших складах.