Робот-машинка Ackerman ROS2/Pi5/4G

Для физических лиц при заказе от 5000 рублей Почтой России

 Доставка
Доставка
 Оплата
Оплата
 Для бизнеса
Для бизнеса
Характеристики Ackerman ROS2/Pi5/4G
Общие данные
Основные характеристики
средний
Посредством стандарта Wi-Fi из мобильного приложения со смартфона
обнаружение и объезд препятствий
умение отслеживать линии и движения по заданной траектории
распознавание цвета
распознавание лиц
распознавание жестов
выполнение команд дистанционно
автопилот
лазерный лидар
Python
Java Script
С
инженерия и проектирование
логика и мышление
программирование
робототехника
схемотехника и электроника
Электромеханический
Описание Ackerman ROS2/Pi5/4G
Технические характеристики Ackerman ROS2/Pi5/4G
| Конфигурация | набор для сборки (конструктор) |
| Микрокомпьютер | Raspberry Pi 5 (4G) |
| Языки программирования | Python / C / C++ / JavaScript |
| Тип шасси | Ackerman |
| Двигатель | 310 с металлическим зубчатым редуктором |
| Кодировщик | однофазный высокоточный квадратурный энкодер |
| ROS | rонтроллер робота RRCLite + материнская плата Tree Poison Pie 5 |
| Способ связи | Wi-Fi / Enthernet |
| Дистанционное управление | посредством стандарта Wi-Fi из мобильного приложения со смартфона либо компьютера |
| Камера наблюдения | монокулярная камера с 2 режимами работы |
| Лидар | Радар Ledong STL-19P |
| Операционная система | Raspberry Pi OS + Ubuntu 22.04 LTS + ROS2 Humble (Docker) |
| Хранение данных | TF-карта 64 Гб |
| Операционная система ROS2 | есть |
| Функционал на базе ИИ | отслеживание цели, отслеживание цвета, отслеживание жестов, распознавание цвета, распознавание QR-кода, цветной патруль, автопилот, управление жестами |
| Характеристики Raspberry Pi 5 (4G) | |
| Процессор | Broadcom BCM2712, четырехъядерный процессор Cortex-A76 (ARM v8) 64-разрядный SoC, частота 2,4 ГГц |
| Графический процессор | 800 МГц VideoCore VII, поддержка OpenCL 3.1, Vulkan 1.2, LPDDR4X- 4267 SDRAM |
| Хранение данных | слот для карт Micro SD поддерживает высокоскоростной режим SDR104 |
| Сеть интернет | Gigabit Ethernet (положение и симметрия Р4В) |
| Интерфейс USB |
2 х USB 3.0, поддержка синхронной работы со скоростью 5 Гбит / с; 2 х USB 2.0 (положение и симметрия Рl4В) |
| Интерфейс CSI / DSI | 2 х 4-полосная МІР-камера или двусторонний дисплей / передачи данных через 22-контактный малый порт |
| Интерфейс HDMI | 2 х порта micro HDMI, может поддерживать двухканальное 4Кр60 и HDR |
| Потребляемая мощность | 5 В / 5 А постоянного тока через интерфейс USB-C (поддержка PD) |
| Часы реального времени (RTC) | разъем аккумулятора RTC (2 контакта JST) |
| UART | выделенный интерфейс UART (3 контакта JST) |
| Интерфейс вентилятора | ШИМ-управление и обратная связь по тахометру (4 контакта JST) |
| Габариты | 85 х 56 мм |
| Характеристики монокулярной камеры | |
| Угол обзора | 170º |
| Светочувствительный чип | GC0308 (Gekewei) |
| Разрешение RGB | 30 Вт (640 х 480) |
| Модель объектива | HS-256-650 (HS) |
| Фокусное расстояние | 1,7 мм |
| Интерфейс камеры | USB |
| Габариты | 30 х 27 х 25 мм |
| Характеристики кронштейна камеры | |
| Модель | LFD-01 |
| Скорость вращения | < 0,11 c / 60°, 6 B |
| Диапазон вращения | 180° |
| Защита от отключения питания после 5 минут простоя | есть |
| Материал вала | пластик |
| Рабочая напряжение | 4,8 - 6 В |
| Максимальный крутящий момент | > 1,4 кг. см., 6 В |
| Габариты | 22,3 х 12 х 23,2 мм |
| Характеристики лидара | |
| Модель | Ledong STL-19P |
| Диапазон сканирования | 360° |
| Точность сканирования | ± 15 при 0,03 - 2 м / ± 20 мм при 2 - 8 м / ± 30 мм при > 8 м |
| Частота сканирования | 5 - 13 Гц |
| Ток питания | 10 - 40 мА |
| Рабочее напряжения | 5 В |
| Скорость передачи данных | 230400 бит / с |
| Принцип сканирования | TOF |
| Радиус сканирования |
белый объект: 12 м; черный объект: 8 м |
| Частота дискретизации | 45000 раз / с |
| Угловое разрешение | 0,167° |
| Выходной интерфейс | UART |
| Рабочая температура окружающей среды | -10 - 40 °C |
| Габариты изделия | 38,59 х 38,59 х 34,8 мм |
| Характеристики ОС ROS2 | |
| Совместимость с ОС | Linux / Windows / Mac / RTOS |
| Распределенная архитектура | DDS |
| Система компиляции | CMake / Ament |
| Общие характеристики | |
| Источник питания | аккумуляторная батарея 2200 мАч, 7,4 В с защитной платой |
| Время автономной работы | 60 мин |
| Материал изделия | металл |
| Диаметр колеса | 65 мм |
| Толщина колеса | 25 мм |
| Габариты изделия | 159 х 213 х 157 мм |
| Габариты упаковки | 412 х 222 х 180 мм |
| Вес нетто | 1,2 кг |
| Вес брутто | 1,95 кг |
| Комплектация | |

|
основание машины – 1 шт |

|
набор пластин – 1 шт |

|
монокулярная камера – 1 шт |

|
материнская плата – 1 шт |

|
TF-карта памяти 65 Гб – 1 шт (опционально) |

|
соединительная линия (100 мм) – 1 шт |

|
вентилятор охлаждения – 1 шт |

|
контроллер RRC Lite – 1 шт |

|
кабель для передачи данных контроллера (280 мм) – 1 шт |

|
кабель для подключения аккумулятора – 1 шт |

|
лидар Ledong STL-19F – 1 шт |

|
4-контактная линия – 1 шт |

|
кабель для передачи данных лидара (50 мм) – 1 шт |

|
зарядное устройство – 1 шт |

|
джойстик + bluetooth модуль (приемник) – 1 шт |

|
картридер – 1 шт |

|
красный мяч – 1 шт |

|
крестообразная отвертка – 1 шт |

|
руководство по эксплуатации – 1 шт |

|
набор крепежных элементов – 1 шт |
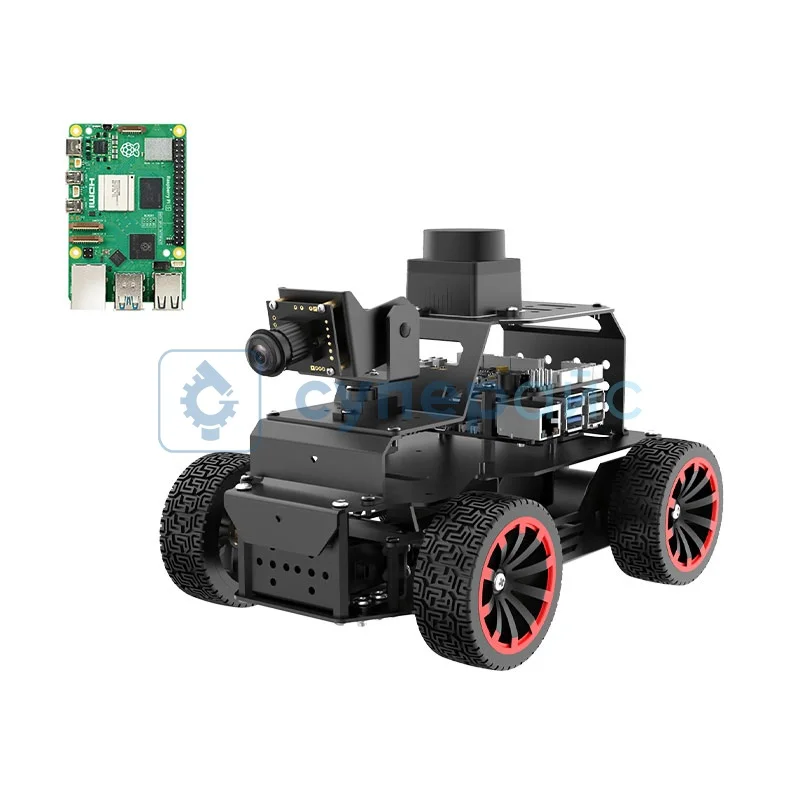
Робот Ackerman ROS2/Pi5/4G
Робот Ackerman ROS2/Pi5/4G представляет собой образовательную платформу на базе raspberry pi для изучения принципов автономной навигации. Набор поставляется в виде конструктора, что помогает понять роль каждого компонента.
Микрокомпьютер Raspberry Pi 5 в составе набора предлагает высокую производительность при обработке информации. Платформа поддерживает четыре языка программирования: Python, C, C++, JavaScript. Такое разнообразие даёт разработчикам свободу выбора инструментов под конкретные задачи.
Шасси типа Ackerman копирует принципы управления автомобилем с передними поворотными колёсами. Дистанционное управление через Wi-Fi будет удобно для оператора при тестировании алгоритмов.
Кому подойдёт платформа:
- студентам для освоения ROS2 на практике;
- преподавателям технических дисциплин для демонстраций;
- разработчикам мобильных роботов для создания прототипов;
- энтузиастам робототехники.
Монокулярная камера располагает двумя режимами работы для обеспечения машинного зрения. Лидар со сканированием на 360 градусов строит детальную карту окружающего пространства в режиме реального времени.
Источник питания представлен аккумулятором ёмкостью 2200 мАч и напряжением 7,4 В. Защитная плата предотвращает повреждение батареи при перезаряде. Время автономной работы 60 минут достаточно для проведения экспериментов без подключения к сети.
Роботы на базе raspberry pi получили распространение благодаря открытой архитектуре. ROS2 предоставляет готовые библиотеки для работы с датчиками, планирования маршрутов.
Какие задачи поможет решать:
- построение карт помещений методом одновременной локализации;
- распознавание объектов средствами машинного зрения;
- автоматическое следование по заданной траектории;
- тестирование алгоритмов избегания препятствий.
Отзывы Ackerman ROS2/Pi5/4G
Сотрудничаем с коммерческими организациями и государственными бюджетными учреждениями.
Работаем по прямому договору и участвуем во всех видах конкурентных процедур в рамках 44-ФЗ и
223-ФЗ. Оказываем помощь в составлении технического задания на оборудование.
Заполните форму и получите всю нужную информацию о выбранном оборудовании в виде коммерческого предложения:
- актуальные цены и сроки поставки;
- информация о скидке;
- наличие на наших складах.
С этим товаром покупают



Для физических лиц при заказе от 5000 рублей Почтой России

Похожие товары
Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Ранее просмотренные Вами
Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России


Благодарственные письма