Роботизированная платформа WHEELTEC Ackerman на Raspberry Pi 4B (4 ГБ)




 Доставка
Доставка
 Оплата
Оплата
 Для бизнеса
Для бизнеса
Характеристики WHEELTEC Pi 4B
Общие данные
Основные характеристики
Общие характеристики
пластик
продвинутый
Посредством стандарта Bluetooth из мобильного приложения со смартфона
обнаружение и объезд препятствий
умение отслеживать линии и движения по заданной траектории
движение за объектом
выполнение команд дистанционно
лазерный лидар
инженерия и проектирование
интерес к наукам
логика и мышление
моторика и ловкость
навыки ведения проектов
программирование
робототехника
социально-эмоциональные навыки
схемотехника и электроника
творческое мышление
Электромеханический
Электронный
Описание WHEELTEC Pi 4B
Технические характеристики WHEELTEC
| Колеса |
колеса Mecanum, перемещение во всех направлениях, 360 градусов свободного движения (совместимо с различными распространенными шинами) |
| Диаметр | 65 мм |
| Грузоподъёмность | до 3 кг |
| Максимальная скорость | 1,2 м/с |
| Время работы |
5,5 ч (при лёгкой нагрузке и скорости 0,45 м /с) 4 ч (при нагрузке 1 кг и скорости 0,45 м /с) |
| Мотор | MG513 |
| Микроконтроллер | STM32F103VET6 |
| Сервопривод | 3119, цифровой рулевой механизм с высоким крутящим моментом 20 кг |
| Датчики | лазерный лидар, датчик угла поворота |
| Управление | мобильное приложение, беспроводной контроллер PS2, CAN |
| Особенности | дистанционное управление, лидарное отображение и навигация, визуальное отображение и навигация, многоточечный круиз, лидарное сопровождение, глубокое зрение, визуальное патрулирование линий, передача изображений через приложение и т. д. |
| Характеристики Raspberry Pi 4B | |
| Процессор | ARM Cortex-A72 1,5 ГГц 64-разрядный (4 ядра) |
| Графический процессор | Broadcom VideoCore VI @ 500 МГц |
| Оперативная память | 4 ГБ |
| Bluetooth | v5.0 с BLE |
| Порты для периферии | USB2.0 x 2, USB3.0 x 2 |
| Вывод изображения | MIPI CSI |
| Цифровой аудио/видеовыход | 2 x micro-HDMI |
| Кодирование видео | H.264 (1080p30) |
| Декодирование видео |
H.264 (1080p60) H.265 (4K60) |
| Карта памяти | microSD, макс размер 64 ГБ |
| WiFi | 802.11 ac |
| Проводная сеть | Ethernet |
| Количество выводов GPIO | 40 |
| Номинальная мощность | 15 Вт (5 В, 3 А) |
| Характеристики сервопривода | |
| Модель | S30F |
| Максимальный угол | 180° |
| Напряжение | 5 - 6,5 В |
| Крутящий момент | 20 кг*см (5 В), 23 кг/см (6.5 В) |
| Скорость реакции | 0,18 с / 60° |
| Тип сервопривода | цифровой |
| Механизм | металлический редуктор |
| Рабочая "мертвая зона" | 4 мкс |
| Ток в режиме ожидания | 4 мА (5 В) |
| Ток остановки | 1,8 мА (5 В) |
| Вес | 62 г |
| Характеристики лидара Leishen N10P | |
| Радиус измерений | 25 метров |
| Частота сканирования | 6 - 12 Гц |
| Частота дискретизации | 5400 Гц |
| Выходные данные | угол, расстояние, интенсивность света |
| Угловое разрешение | 0,4 - 0,8° |
| Устойчивость к свету | 60KLux |
| Интерфейс | последовательный порт |
| Тип двигателя | бесщёточный |
| Сканирование на 360° | есть |
| Характеристики камеры Astra Pro RGBD | |
| Разрешение по глубине | до 640 x 480 |
| Разрешение по RGB | до 640 x 480 |
| Угол обзора датчика RGB | 63,1 x 49,4° |
| Угол обзора датчика глубины | 58,4 x 45,5° |
| Частота обновлений глубины | 640 x 480 до 30 кадров в секунду |
| Частота сердечника RGB | 640 x 480 до 30 кадров в секунду |
| Диапазон глубин | от 0,6 до 4 м |
| Интерфейс | USB2.0 |
| Размер | 165 x 40 x 30 мм |
| Характеристики мотора MG513 | |
| Номинальное напряжение | 12 В |
| Номинальная мощность | 4,32 Вт |
| Номинальный ток | 360 мА |
| Номинальный крутящий момент | ~ 0,1 Н*м |
| Пусковой момент | ~ 1 Н*м |
| Ток среза | 2,8 А |
| Передаточное число двигателя | 1:30 |
| Диаметр выходного вала | 6 мм |
| Скорость до замедления | 11000 об/мин |
| Скорость после замедления | 366 ± 10 об/мин |
| Характеристики датчика угла поворота (энкодера) | |
| Тип | энкодер GMR фазы AB |
| Коэффициент уменьшения | 1:30 |
| Номинальный крутящий момент | 1 кг*см |
| Тормозящий момент | 4,5 кг*см |
| Напряжение | 12 В |
| Ток | 360 мА |
| Мощность | 4,32 Вт |
| Общие характеристики | |
| Питание | аккумулятор 6000 мАч, 11.1 В |
| Габариты | 330 x 255 x 225 мм |
| Вес брутто | 3,461 кг |
| Комплектация | |

|
Raspberry Pi 4B – 1 шт |

|
лидар N10P – 1 шт |

|
аккумулятор 8400 мАч – 1 шт |

|
камера глубины Astra Pro RGBD – 1 шт |

|
беспроводной контроллер PS2 – 1 шт |

|
дифференциальный механизм – 1 шт |

|
зарядное устройство – 1 шт |
|
|
USB-провод – 1 шт |
|
|
мотор MG513 – 4 шт |
|
|
каркас – 1 комплект |
|
|
механизм подвески – 1 комплект |
|
|
крепление мотора – 1 шт |
|
|
соединительные детали – 1 комплект |
 Обратите внимание! Набор представляет собой конструктор и предполагает наличие у пользователя базовых навыков конструирования, программирования и отладки. Необходимые учебно-методические материалы по сборке и программированию робота размещены в разделе «ДОКУМЕНТАЦИЯ И ПО».
Обратите внимание! Набор представляет собой конструктор и предполагает наличие у пользователя базовых навыков конструирования, программирования и отладки. Необходимые учебно-методические материалы по сборке и программированию робота размещены в разделе «ДОКУМЕНТАЦИЯ И ПО».
Менеджеры по работе с клиентами не предоставляют консультации по программированию: набор предполагает самостоятельную сборку управляющего устройства на базе микрокомпьютера и набора датчиков с последующим программированием законченного устройства в целях развития и формирования у пользователя инженерного мышления и умений программирования робототехнических систем.
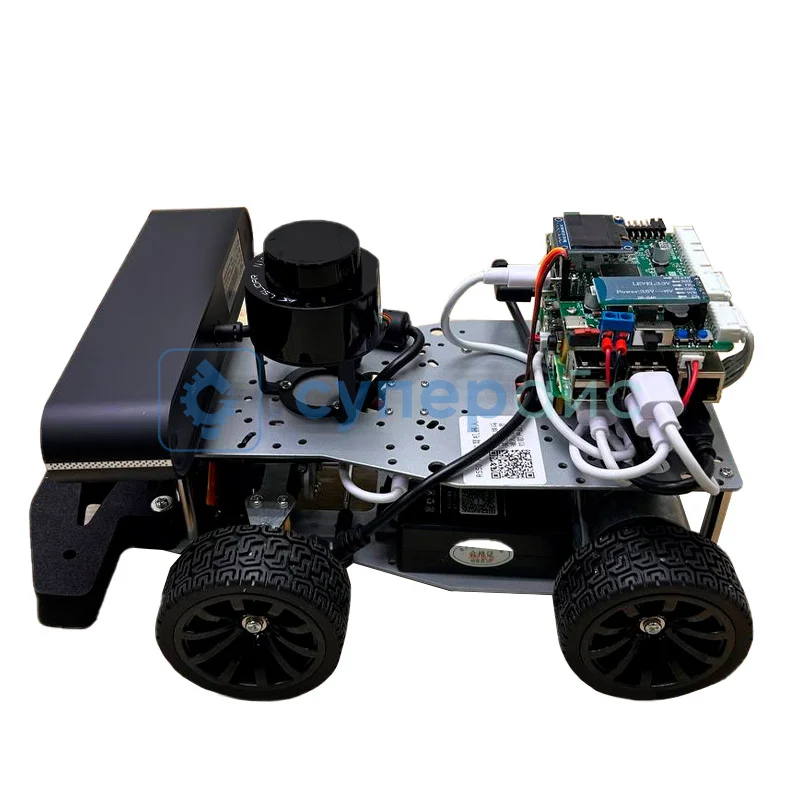
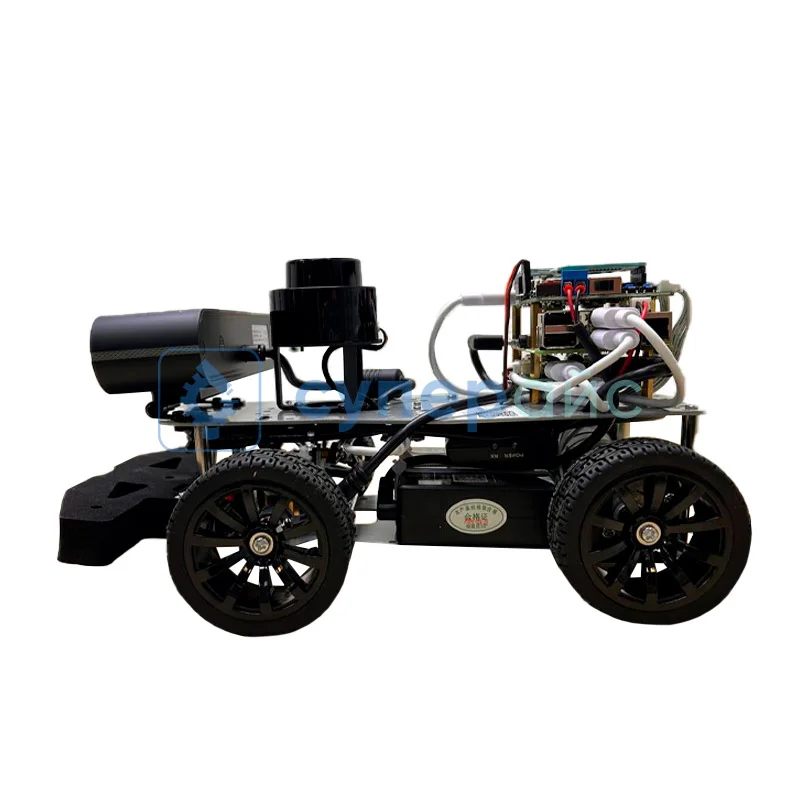
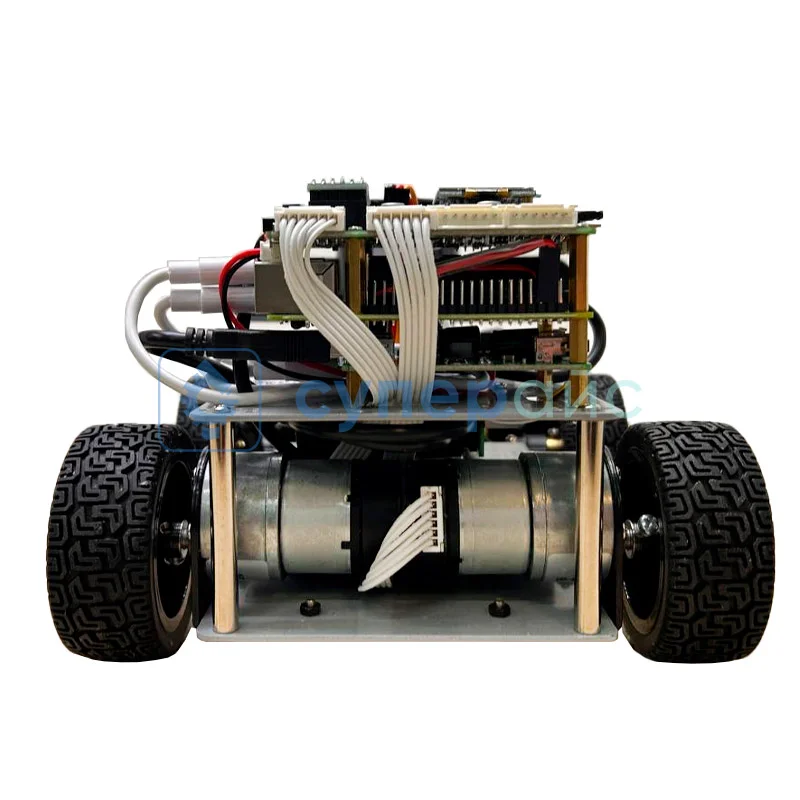
Платформа WHEELTEC Ackerman на Raspberry Pi 4B (4 ГБ)
Конструктор машины для мальчиков WHEELTEC Ackerman на Raspberry Pi 4B (4 ГБ) — набор для создания интеллектуальных машин. Основанный на Raspberry Pi 4B с 4 ГБ памяти, этот робот позволяет решать сложные задачи, от запрограммированного движения до анализа окружающей среды при помощи камер и датчиков.
Робот оборудован четырьмя колесами Mecanum, что предлагает полную свободу движения на 360 градусов и позволяет легко маневрировать в любом из направлений. Грузоподъемность до 3 кг делает его подходящим как для учебных проектов, так и для реальных инженерных задач. Управлять роботом можно через мобильное приложение или беспроводной геймпад PS2.
Особенностью платформы является лидар и камера Astra Pro RGBD, которые отвечают за визуальное отображение, навигацию и сопровождение объектов. Робот способен строить карты, распознавать и отслеживать объекты в реальном времени, что делает его незаменимым для автоматизированных проектов.
Благодаря сервоприводам с крутящим моментом в 20 кг, платформа точно и плавно выполняет команды, сохраняя высокую скорость и стабильность работы. Этот робот машина с камерой — выбор для тех, кто интересуется робототехникой, программированием и созданием уникальных машин.
Документация и ПО WHEELTEC Pi 4B
Отзывы WHEELTEC Pi 4B

Сборка – крепкая, колёса крутятся уверенно, моторы справляются с небольшими препятствиями (ковёр, провода). Мощности Raspberry Pi хватает для ROS, OpenCV и даже каких-то простых алгоритмов SLAM (если не гнаться за FPS). Поддержка ROS – главный козырь. Если ты в теме, то можно быстро начать тестировать свои алгоритмы.
Здравствуйте!
Благодарим вас за подробный и содержательный отзыв о платформе WHEELTEC Ackerman на базе Raspberry Pi 4B.
Рады слышать, что вы оценили качество сборки и технические возможности устройства — особенно приятно знать, что моторы уверенно преодолевают препятствия, а Raspberry Pi справляется с нагрузкой под ROS и OpenCV. Вы совершенно правы: поддержка ROS действительно делает эту платформу особенно привлекательной для разработчиков и исследователей, работающих с алгоритмами навигации и компьютерного зрения.
Спасибо, что поделились своим опытом — ваша обратная связь ценна и мотивирует нас и дальше развивать ассортимент для энтузиастов робототехники.
С уважением, Администрация магазина Суперайс
Сотрудничаем с коммерческими организациями и государственными бюджетными учреждениями.
Работаем по прямому договору и участвуем во всех видах конкурентных процедур в рамках 44-ФЗ и
223-ФЗ. Оказываем помощь в составлении технического задания на оборудование.
Заполните форму и получите всю нужную информацию о выбранном оборудовании в виде коммерческого предложения:
- актуальные цены и сроки поставки;
- информация о скидке;
- наличие на наших складах.
С этим товаром покупают
Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Похожие товары
Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России
Для физических лиц при заказе от 5000 рублей Почтой России

Ранее просмотренные Вами
Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России



Благодарственные письма