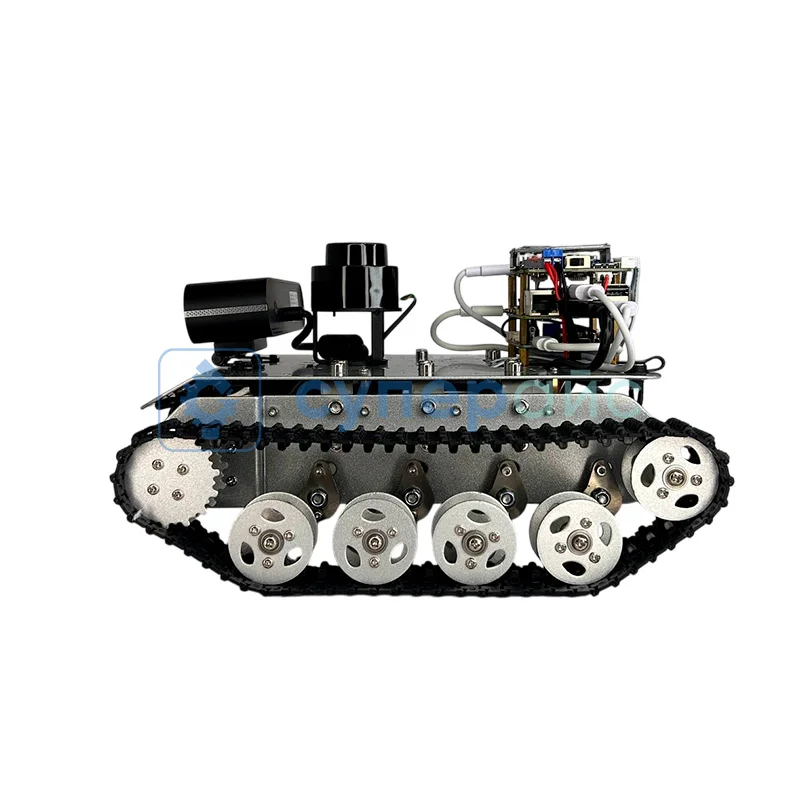
Гусеничный робот WHEELTEC на Raspberry Pi 5 (4 ГБ)











 Доставка
Доставка
 Оплата
Оплата
 Для бизнеса
Для бизнеса
Характеристики WHEELTEC Pi 4B
Общие данные
Основные характеристики
Общие характеристики
пластик
продвинутый
Робот луноход
Посредством стандарта Bluetooth из мобильного приложения со смартфона
обнаружение и объезд препятствий
умение отслеживать линии и движения по заданной траектории
движение за объектом
выполнение команд дистанционно
лазерный лидар
инженерия и проектирование
интерес к наукам
логика и мышление
моторика и ловкость
навыки ведения проектов
программирование
робототехника
социально-эмоциональные навыки
схемотехника и электроника
творческое мышление
Электромеханический
Электронный
Описание WHEELTEC Pi 4B
Технические характеристики WHEELTEC
| Среда разработки | Ubuntu18.04 |
| Шасси | гусеничное, из алюминиевого сплава с независимым подвесом и амортизацией |
| Грузоподъёмность | до 4 кг |
| Максимальная скорость | 1 м/с |
| Время работы |
5,5 ч (при лёгкой нагрузке и скорости 0.45 м /с) 4 ч (при нагрузке 1 кг и скорости 0.45 м /с) |
| Камера | Astra Pro RGBD |
| Мотор | MG513 |
| Микроконтроллер | STM32F103VET6 |
| Датчики | лазерный лидар, датчик Холла |
| Управление | мобильное приложение, беспроводной контроллер PS2, CAN |
| Функции |
дистанционное управление, лидарное отображение и навигация, визуальное отображение и навигация, многоточечный круиз, лидарное сопровождение, глубокое зрение, визуальное патрулирование линий, передача изображений через приложение и т. д. |
| Характеристики платы Raspberry Pi 5 | |
| Центральный процессор (CPU) | ARM Cortex-A76 64-бит, 4 ядра, 2,4 ГГц |
| Графический процессор (GPU) | VideoCore VII GPU @800 МГц |
| Оперативная память | 4 ГБ |
| Bluetooth | v5.0 с BLE |
| Порты для периферии | USB2.0 x 2, USB3.0 x 2 |
| Цифровой аудио/видеовыход | 2 x micro-HDMI (макс. разрешение 4K@60) |
| Видеодекодирование | H.265 (4K@60) |
| Сетевой интерфейс | Gigabit Ethernet / Wifi 802.11ac |
| GPIO / выводы | да |
| Порт для экрана | Display Serial Interface (MIPI DSI) |
| Потребляемая мощность | 25 Вт (5В / 5А) |
| Питание | 5В |
| Характеристики лидара N10P | |
| Сканирование | на 360° |
| Расстояние сканирования | 25 м |
| Частота сканирования | 6–12 Гц (настраиваемая) |
| Частота выборки | 5400 Гц |
| Выходные данные | угол, расстояние, яркость |
| Угловое разрешение | 0,4 – 0,8° (настраиваемое) |
| Светоустойчивость | 60K Люкс (подходит для помещений) |
| Тип интерфейса | последовательный порт (UART) |
| Принцип работы | TOF (время пролета) |
| Характеристики мотора MG513 | |
| Номинальное напряжение | 12 В |
| Номинальная мощность | 4,32 Вт |
| Номинальный ток | 360 мА |
| Номинальный крутящий момент | ~ 0,1 Н*м |
| Пусковой момент | ~ 1 Н*м |
| Ток среза | 2.8 А |
|
Передаточное число двигателя |
1:30 |
| Диаметр выходного вала | 6 мм |
| Скорость до замедления | 11000 об/мин |
| Скорость после замедления | 366 ± 10 об/мин |
| Характеристики датчика угла поворота (GMR-энкодер) | |
| Тип | GMR |
| Редукция (передаточное число) | 1 : 30 |
| Номинальное напряжение | 12 В |
| Номинальный крутящий момент | 1 кг·см |
| Номинальный ток | 360 мА |
| Номинальная мощность | 4,32 Вт |
| Пиковый крутящий момент | 4,5 кг·см |
| Пиковый ток | 3,2 А |
| Общие характеристики | |
| Питание | 5100 мАч, 12 В |
| Габариты | 270 x 270 x 187 мм |
| Вес брутто | 4,35 кг |
| Комплектация | |
 |
робот в сборе - 1 шт |

|
блок питания - 1 шт |
 |
провод USB - USB-C – 1 шт |
 |
картридер microSD – 1 шт |

|
беспроводной контроллер – 1 шт |
 Обратите внимание! Набор представляет собой конструктор и предполагает наличие у пользователя базовых навыков конструирования, программирования и отладки. Необходимые учебно-методические материалы по сборке и программированию робота размещены в разделе «ДОКУМЕНТАЦИЯ И ПО».
Обратите внимание! Набор представляет собой конструктор и предполагает наличие у пользователя базовых навыков конструирования, программирования и отладки. Необходимые учебно-методические материалы по сборке и программированию робота размещены в разделе «ДОКУМЕНТАЦИЯ И ПО».
Менеджеры по работе с клиентами не предоставляют консультации по программированию: набор предполагает самостоятельную сборку управляющего устройства на базе микрокомпьютера и набора датчиков с последующим программированием законченного устройства в целях развития и формирования у пользователя инженерного мышления и умений программирования робототехнических систем.
Робот-танк WHEELTEC на гусеничном ходу: мощь и автономия в одном устройстве
Гусеничный робот-конструктор WHEELTEC на базе Raspberry Pi 5 (4 ГБ) — это инженерная платформа для решения задач в условиях сложной местности. В отличие от колесных аналогов, его алюминиевое шасси с независимой амортизацией и двигатели MG513 (12 В, 360 мА) обеспечивают проходимость по песку, траве и бетону.
Особенности
- Гусеничный механизм: Высокая устойчивость на песке, траве, бетоне и уклонах до 8°.
- Камера глубины Astra Pro RGBD: Сканирование пространства в реальном времени (диапазон 0,6–4 м) для построения карт и обхода препятствий.
- Моторы MG513: Крутящий момент ~0,1 Н·м и передаточное отношение 1:30 обеспечивают баланс между скоростью и силой.
- Микроконтроллер STM32F103VET6: Точное управление движением и синхронизация данных с датчиками.
- Мобильное управление: Работа через приложение, PS2-джойстик или CAN-интерфейс.
WHEELTEC сочетает Ubuntu 18.04 и поддержку ROS (Robot Operating System) для реализации алгоритмов навигации, сопровождения объектов и автономного принятия решений. Его лазерный лидар N10P сканирует окружающую среду на 360° с дальностью до 25 м, а Wi-Fi 2,4/5 ГГц и Bluetooth 5.0 позволяют передавать данные в реальном времени. Время автономной работы — до 5,5 часов при нагрузке 1 кг, что критично для долгих экспедиций или наблюдения за территорией.
Преимущества и возможности
- Проходимость: Гусеница с амортизацией преодолевает препятствия, где колеса бесполезны.
- Модульность: Возможность добавления термодатчиков, датчиков газа или камер для специализированных задач.
- Точность: Энкодеры 390 импульсов/оборот и лидар N10P гарантируют корректное позиционирование.
- Долгий срок службы: Алюминиевый каркас и защита от перегрева увеличивают надежность в полевых условиях.
WHEELTEC — это не просто робот-танк, а инженерная платформа для создания инновационных решений. Его способность к автономии, точность лидара и совместимость с ROS делают его незаменимым в лабораториях, на производстве и даже в сельском хозяйстве.

Документация и ПО WHEELTEC Pi 4B
Отзывы WHEELTEC Pi 4B

Сотрудничаем с коммерческими организациями и государственными бюджетными учреждениями.
Работаем по прямому договору и участвуем во всех видах конкурентных процедур в рамках 44-ФЗ и
223-ФЗ. Оказываем помощь в составлении технического задания на оборудование.
Заполните форму и получите всю нужную информацию о выбранном оборудовании в виде коммерческого предложения:
- актуальные цены и сроки поставки;
- информация о скидке;
- наличие на наших складах.
С этим товаром покупают
Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Похожие товары
Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Ранее просмотренные Вами
Для физических лиц при заказе от 5000 рублей Почтой России


Для физических лиц при заказе от 5000 рублей Почтой России
Для физических лиц при заказе от 5000 рублей Почтой России

Благодарственные письма