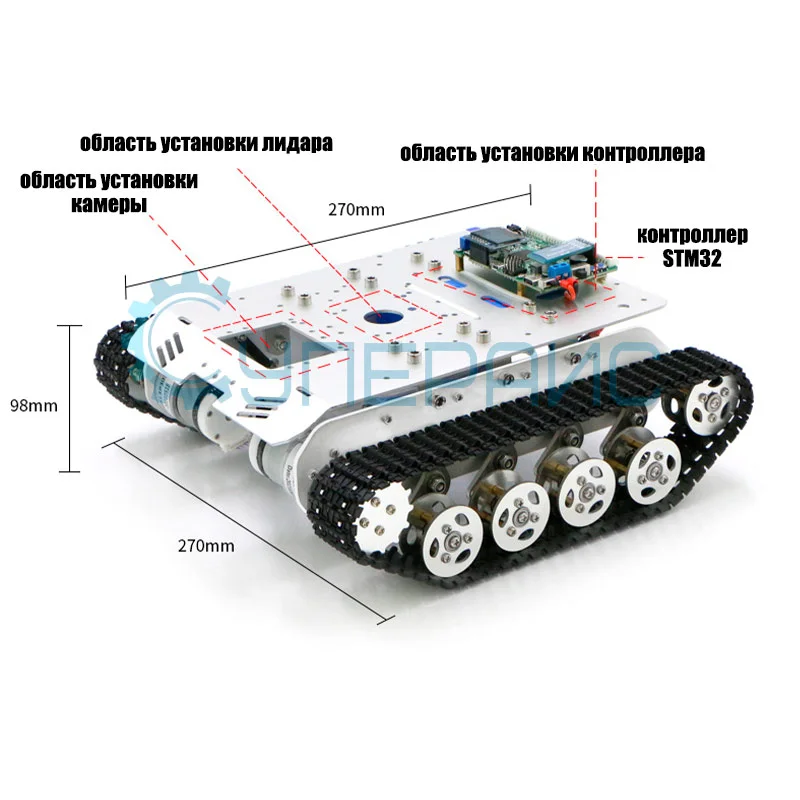
Робот на гусеничном шасси WHEELTEC на базе STM32



 Доставка
Доставка
 Оплата
Оплата
 Для бизнеса
Для бизнеса
Характеристики WHEELTEC на базе STM32
Общие данные
Основные характеристики
Общие характеристики
средний
Робот луноход
инженерия и проектирование
интерес к наукам
логика и мышление
моторика и ловкость
навыки ведения проектов
программирование
робототехника
социально-эмоциональные навыки
схемотехника и электроника
творческое мышление
Описание WHEELTEC на базе STM32
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ манипулятора WHEELTEC
| Характеристики манипулятора WHEELTEC | |
| Плата управления | STM32 |
| Управляющий контроллер |
STM32F407VET6 |
| Максимальная скорость | 1 м/с |
| Грузоподъемность | 4 кг |
| Приводная конструкция | двухколесный гусеничный механизм (с независимой подвеской и амортизацией) |
| Колеса |
гусеничное шасси из алюминиевого сплава |
| Двигатель | MG513 |
| Энкодер | фотоэлектрический |
| Способ управления | мобильное приложение, беспроводной контроллер PS2, CAN и т.д |
| Функциональные возможности |
движение в различных направлениях, движение по заданной траектории, предотвращение столкновения |
| Характеристики мотора MG513 | |
| Номинальное напряжение | 12 В |
| Номинальная мощность | 4.32 Вт |
| Номинальный ток | 360 мА |
| Номинальный крутящий момент | ~ 0,1 Н*м |
| Пусковой момент | ~ 1 Н*м |
| Ток среза | 2.8 А |
|
Передаточное число двигателя |
1:30 |
| Диаметр выходного вала | 6 мм |
| Скорость до замедления | 11000 об/мин |
| Скорость после замедления | 366 ± 10 об/мин |
|
Характеристики датчика угла поворота (энкодера) |
|
| Тип | фотоэлектрический |
| Разрешение | 500*30 (измерено на выходном валу редуктора) |
| Напряжение | 3.3 - 5 В |
| Тип интерфейса | XH2.54 |
| Характеристики контроллера STM32 | |
|
Микроконтроллер |
STM32F103C8T6, ядро ARM Cotrex M3 |
| Максимальная частота |
72 МГц |
| Разрядность | 32 бита |
|
Объем памяти программ (FLASH) |
64/128 кБайт |
| Объем памяти, RAM |
20 кБайт |
|
Выводы |
37 |
|
Таймеры общего назначения |
3 |
|
Расширенный таймер с ШИМ управления двигателем |
1 |
|
Системный таймер |
1 |
|
Сторожевые таймеры |
2 |
|
UART |
3 |
|
SPI |
2 |
|
I2C |
2 |
|
CAN |
1 |
|
USB |
1 |
|
Контроллеры прямого доступа к памяти |
7 |
| АЦП |
2 АЦП, 10 каналов, время преобразования 1 мкс |
|
Часы реального времени |
есть |
|
Аппаратный модуль расчета CRC |
есть |
|
Напряжение питания микроконтроллера |
2 - 3.6 В |
|
Напряжение питания платы |
5 В |
|
Ток потребления |
до 50 мА |
| Температура | - 40 - 85°С |
| Характеристики аккумуляторной батареи | |
| Напряжение питания | 12 В |
| Емкость | 9800 мАч |
| Интерфейс |
Т-образный штекер |
| Габариты | 98.6 х 62 х 29 мм |
| Вес | 0.36 кг |
| Общие характеристики | |
| Питание | DC 12 В, 5 А |
| Материал корпуса | алюминиевый сплав |
| Время автономной работы |
при небольшой нагрузки (скорость 0.45 м/с) - 5.5 ч, при нагрузки 1 кг (скорость 0.45 м/с) - 4 часа |
| Габариты | 270 х 270 х 160 мм |
| Вес нетто | 2,54 кг |
| Вес брутто | 3.028 кг |
| Комплектация | |
 |
контроллер STM32F407VET6 - 1 шт |
 |
аккумулятор – 1 шт |
 |
двигатель MG513 - 2 шт |
 |
боковая панель - 2 шт |
|
|
гусеничное шасси - 2 шт |
|
|
колесный модуль - 2 шт |
|
|
шатун - 8 шт |
|
|
шасси - 1 шт |
|
|
разъем L-типа - 6 шт |
|
|
разъем L-типа - 6 шт |
|
|
колесный модуль - 10 шт |
|
|
отвертка - 1 шт |
|
|
соединительные детали – 1 комплект |
 Обратите внимание! Набор представляет собой конструктор и предполагает наличие у пользователя базовых навыков конструирования, программирования и отладки. Необходимые учебно-методические материалы по сборке и программированию робота размещены в разделе «ДОКУМЕНТАЦИЯ И ПО».
Обратите внимание! Набор представляет собой конструктор и предполагает наличие у пользователя базовых навыков конструирования, программирования и отладки. Необходимые учебно-методические материалы по сборке и программированию робота размещены в разделе «ДОКУМЕНТАЦИЯ И ПО».
Менеджеры по работе с клиентами не предоставляют консультации по программированию: набор предполагает самостоятельную сборку управляющего устройства на базе микроконтроллера и набора датчиков с последующим программированием законченного устройства в целях развития и формирования у пользователя инженерного мышления и умений программирования робототехнических систем.
Отзывы WHEELTEC на базе STM32

Сотрудничаем с коммерческими организациями и государственными бюджетными учреждениями.
Работаем по прямому договору и участвуем во всех видах конкурентных процедур в рамках 44-ФЗ и
223-ФЗ. Оказываем помощь в составлении технического задания на оборудование.
Заполните форму и получите всю нужную информацию о выбранном оборудовании в виде коммерческого предложения:
- актуальные цены и сроки поставки;
- информация о скидке;
- наличие на наших складах.
С этим товаром покупают
Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Ранее просмотренные Вами
Для физических лиц при заказе от 5000 рублей Почтой России

Благодарственные письма