Робот на гусеничном шасси ROS Robot smart car A на Raspberry Pi 4B (2 ГБ)
Код товара: 13370
 Гарантия 3 месяца
Гарантия 3 месяца



 О товаре
О товаре  Гусеничный робот ROS Robot smart car A на Raspberry Pi 4B (2 ГБ). Встроенный сенсорный дисплей. Возможность отслеживания препятствий на 360 градусов благодаря лидару, 9-осевой гироскоп. Программирование на C++, Python.
Гусеничный робот ROS Robot smart car A на Raspberry Pi 4B (2 ГБ). Встроенный сенсорный дисплей. Возможность отслеживания препятствий на 360 градусов благодаря лидару, 9-осевой гироскоп. Программирование на C++, Python. 
 Доставка
Доставка
Транспортной компанией по РФ и СНГ
Курьером по Москве
Самовывоз из магазина
 Оплата
Оплата
Для юрлиц – переводом на расчётный счёт
Для физлиц – банковской картой онлайн, наложенным платежом и наличными
 Для
бизнеса
Для
бизнеса
Аккредитованы на ЭТП
Участвуем в госзакупках по 223-ФЗ и 44-ФЗ
Оказываем помощь в разработке ТЗ
О товаре Гусеничный робот ROS Robot smart car A на Raspberry Pi 4B (2 ГБ). Встроенный сенсорный дисплей. Возможность отслеживания препятствий на 360 градусов благодаря лидару, 9-осевой гироскоп. Программирование на C++, Python. Технические характеристики ROS Robot smart car A
| Характеристики Raspberry Pi 4B | |
| SoC | Broadcom BCM2711 |
| Процессор | ARM Cortex-A72 1,5 ГГц 64-разрядный (4 ядра) |
| Графический процессор | Broadcom VideoCore VI @ 500 МГц |
| Оперативная память | 2 ГБ |
| Bluetooth | v5.0 с BLE |
| Порты для периферии | USB2.0 x 2, USB3.0 x 2 |
| Цифровой аудио/видеовыход | 2 x micro-HDMI версии 2.0 |
| Максимальное выходное разрешение | 2160p (60 Гц) |
| Максимальное разрешение в режиме двух мониторов | 2160p (30 Гц) |
| Аналоговый аудио/видеовыход | 4-контактный мини-джек 3.5 мм |
| Порт для камеры | Camera Serial Interface (MIPI CSI) |
| Порт для экрана | Display Serial Interface (MIPI DSI) |
| Карта памяти | microSD< |
| Порты ввода-вывода GPIO | 40 |
| Цифровой аудио/видеовыход | 2×micro-HDMI версии 2.0 |
| WiFi | 802.11 b/g/n/ac, двухдиапазонный Wi-Fi адаптер (2.4/5 ГГц) |
| Проводная сеть | Ethernet 1 Гбит/с |
| PoE | есть (с использованием PoE HAT) |
| Рабочая температура | 0 ~ 50°C |
| Питание | Type-C (5 В, 3 А) |
| Габариты |
85 x 56 x 17 мм |
| Характеристики сканера - дальномера RPLIDAR A1 | |
| Угловая подача | 0 - 360° |
| Расстояние сканирования | 6 метров |
| Точность определения дистанции |
0.2 см |
| Частота адаптивного сканирования | 5 - 10 Гц |
| Интерфейс обмена | UART |
| Характеристики ROS Robot | |
| Микроконтроллер | STM32F103RCT6 |
| Датчики | 9-осевой гироскоп, лазерный лидар |
| Индикация | 3х сегментный цифровой индикатор |
| Экран | 7" сенсорный экран |
| Управление | мобильное приложение посредством Wi-Fi, встроенный сенсорный дисплей |
| Программирование | C++, Python |
| Функциональные возможности | передвижение, обнаружение препятствий на 360° |
| Общие характеристики | |
| Питание | аккумулятор 8400 мАч |
| Габариты | 322 x 242 x 300 мм |
| Вес | 3.1 кг |
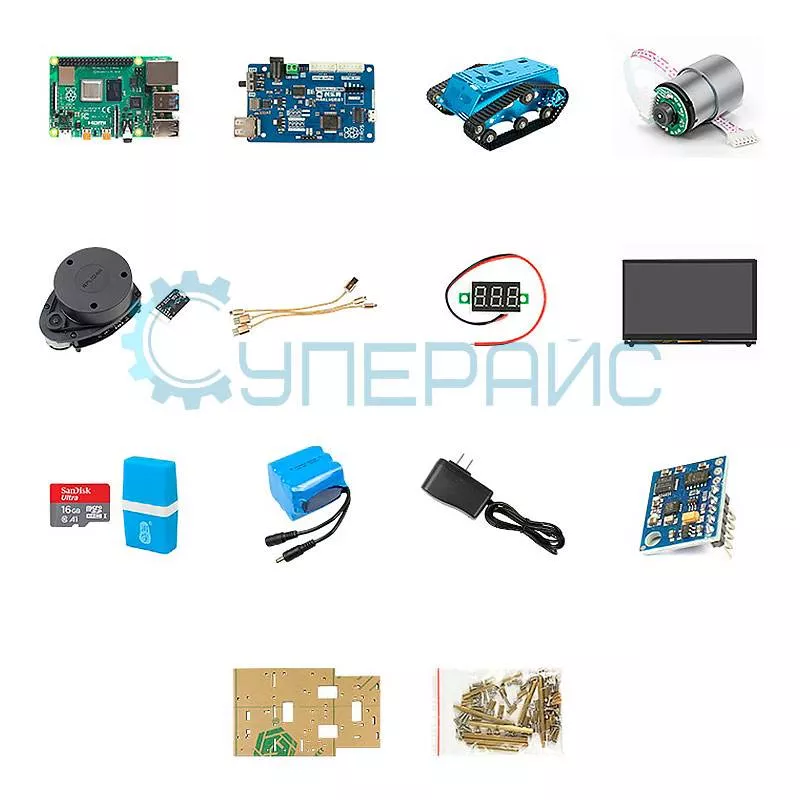
| Комплектация | |

|
основа – 1 шт |

|
Raspberry Pi 4B – 1 шт |

|
плата Makerobot ROSRobot:2WD - 1 шт |

|
лидар RPLIDAR A1 – 1 шт |

|
карта памяти 16 ГБ + кард-ридер – 1 шт |

|
аккумулятор 8400 мАч – 1 шт |

|
крепежи – 1 набор |

|
ротор – 2 шт |

|
соединительный кабель – 1 комплект |

|
сегментный индикатор – 1 шт |

|
дисплей – 1 шт |

|
адаптер питания – 1 шт |
|
пластина – 1 шт |

|
гироскоп – 1 шт |
 Обратите внимание! Набор представляет собой конструктор и предполагает наличие у пользователя базовых навыков конструирования, программирования и отладки. Необходимые учебно-методические материалы по сборке и программированию робота размещены в разделе «ДОКУМЕНТАЦИЯ И ПО».
Обратите внимание! Набор представляет собой конструктор и предполагает наличие у пользователя базовых навыков конструирования, программирования и отладки. Необходимые учебно-методические материалы по сборке и программированию робота размещены в разделе «ДОКУМЕНТАЦИЯ И ПО».
Менеджеры по работе с клиентами не предоставляют консультации по программированию: набор предполагает самостоятельную сборку управляющего устройства на базе микрокомпьютера и набора датчиков с последующим программированием законченного устройства в целях развития и формирования у пользователя инженерного мышления и умений программирования робототехнических систем.
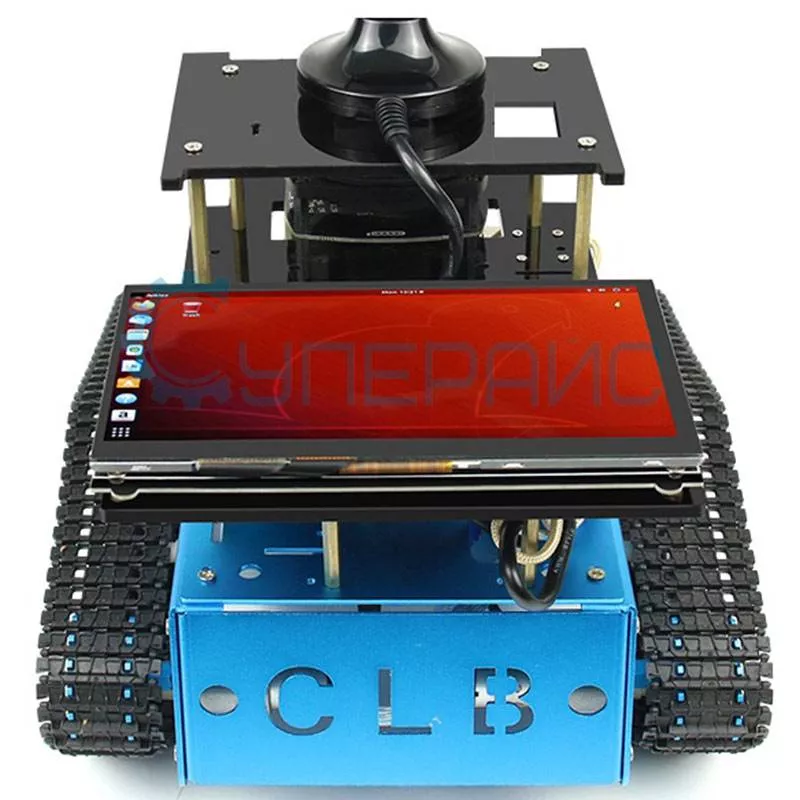
Робот танк ROS Robot smart car A
Гусеничный робот ROS Robot smart car A на Raspberry Pi 4B (2 ГБ) представляет собой надежный и удобный для программирования робототехнический набор, выполненный на гусеничном шасси. Основой конструкции служит корпус, оснащенный платой Raspberry Pi 4B с объемом оперативной памяти 2 ГБ. Такой робот поддерживает распознавание препятствий и безопасное передвижение благодаря встроенной системе с дальномером лидаром RPLIDAR A1 и 9-осевым гироскопом. Эти компоненты делают его подходящим вариантом для создания и тестирования собственных программ и робототехнических решений.
Поддержка языков программирования C++ и Python открывает широкий спектр возможностей для обучения и практики в области робототехники и искусственного интеллекта. Для управления ROS Robot можно использовать мобильное приложение через Wi-Fi, либо встроенный сенсорный дисплей, что предлагает оперативно контролировать и изменять траекторию движения. Гусеничное шасси для робота обеспечивает стабильность на поверхностях, а разъёмы для подключения дополнительных датчиков позволяют расширить функциональные возможности робота.
Преимущества робототехнического набора – высокая маневренность, устойчивость, мощная аккумуляторная батарея на 8400 мАч и совместимость с аксессуарами и модулями.

Технические характеристики, внешний вид и комплектация товара могут быть изменены производителем без предварительного уведомления.
Благодарственные письма
Посмотреть все

Сотрудничаем с коммерческими организациями и государственными бюджетными учреждениями.
Работаем по прямому договору и участвуем во всех видах конкурентных процедур в рамках 44-ФЗ и
223-ФЗ. Оказываем помощь в составлении технического задания на оборудование.
Заполните форму и получите всю нужную информацию о выбранном оборудовании в виде коммерческого предложения:
- актуальные цены и сроки поставки;
- информация о скидке;
- наличие на наших складах.
С этим товаром покупают
Для физических лиц при заказе от 3000 рублей Почтой России
 Робот-танк Xiao-r TH-X AI Raspberry Pi 4B (4GB) A2 Claw с голосовым модулем, для управления направлением движением и траекторией автомобиля в режиме реального времени
Робот-танк Xiao-r TH-X AI Raspberry Pi 4B (4GB) A2 Claw с голосовым модулем, для управления направлением движением и траекторией автомобиля в режиме реального времени
Для физических лиц при заказе от 3000 рублей Почтой России
 Умный робот на контроллере Raspberry Pi 4Bс возможностью программирования на языках C++, Python, Java, JavaScript
Умный робот на контроллере Raspberry Pi 4Bс возможностью программирования на языках C++, Python, Java, JavaScript
Для физических лиц при заказе от 3000 рублей Почтой России
 Набор Yahboom Raspberry Pi 4 B 4WD smart robot для сборки машины - робота и программирования на C++, Python, Java, JavaScript. Управление через приложение
Набор Yahboom Raspberry Pi 4 B 4WD smart robot для сборки машины - робота и программирования на C++, Python, Java, JavaScript. Управление через приложение
Для физических лиц при заказе от 3000 рублей Почтой России
 Набор для сборки робота WHEELTEC Mecanum Wheel Edition с Raspberry Pi 4B (4 ГБ) плате в комплекте. Осуществляет движение в различных направлениях, дистанционное управление, восприятие местности 360°. Камера Astra Pro RGBD.
Набор для сборки робота WHEELTEC Mecanum Wheel Edition с Raspberry Pi 4B (4 ГБ) плате в комплекте. Осуществляет движение в различных направлениях, дистанционное управление, восприятие местности 360°. Камера Astra Pro RGBD.
Похожие товары
Для физических лиц при заказе от 3000 рублей Почтой России
 Робот на гусеничном шасси с камерой ROS Robot smart car B с расширенной оперативной памятью до 4 ГБ на на Raspberry Pi 4B. Сканер - дальномер RPLIDAR A1 с углом обзора до 360°, расстояние сканирования до 6 метров.
Робот на гусеничном шасси с камерой ROS Robot smart car B с расширенной оперативной памятью до 4 ГБ на на Raspberry Pi 4B. Сканер - дальномер RPLIDAR A1 с углом обзора до 360°, расстояние сканирования до 6 метров.
Для физических лиц при заказе от 3000 рублей Почтой России
Робот-танк Xiao-r TH-X AI Raspberry Pi 4B (4GB) A2 Claw с голосовым модулем, для управления направлением движением и траекторией автомобиля в режиме реального времени
Для физических лиц при заказе от 3000 рублей Почтой России
 Робот-танк Xiao-r TH-X AI Raspberry Pi 4B (2GB) A1 Claw с голосовым модулем, для управления направлением движением и траекторией автомобиля в режиме реального времени. Защита от падения
Робот-танк Xiao-r TH-X AI Raspberry Pi 4B (2GB) A1 Claw с голосовым модулем, для управления направлением движением и траекторией автомобиля в режиме реального времени. Защита от падения
Для физических лиц при заказе от 3000 рублей Почтой России
Набор Yahboom Raspberry Pi 4 B 4WD smart robot для сборки машины - робота и программирования на C++, Python, Java, JavaScript. Управление через приложение