Робот-рука WHEELTEC R500A с камерой глубины Astra Pro






 Доставка
Доставка
 Оплата
Оплата
 Для бизнеса
Для бизнеса
Характеристики WHEELTEC R500A
Общие данные
Основные характеристики
Общие характеристики
Посредством стандарта Wi-Fi из мобильного приложения со смартфона
захват и перемещение небольших предметов
инженерия и проектирование
интерес к наукам
логика и мышление
моторика и ловкость
навыки ведения проектов
программирование
робототехника
социально-эмоциональные навыки
схемотехника и электроника
творческое мышление
Описание WHEELTEC R500A
Технические характеристики WHEELTEC R500A
| Операционная система | Ubuntu 18.04 |
| Плата управления | Raspberry Pi 5 |
| Двигатель | MG513 |
| Микроконтроллер | STM32F407VET6 |
| Энкодер | инкрементный датчик Холла (магнитный) фазы AB, 500 импульсов за оборот |
| Привод | четырехколесная конструкция Mecanum с маятниковой подвеской |
| Колеса | диаметр 75 мм |
| Степень свободы (DOF) | 4 свободы |
| Грузоподъемность | 6 кг |
| Максимальная скорость | 1.4 м/с |
| Камера глубины | Astra RGBD |
| Сенсор IMU | ICM20948 |
| Управление | мобильное приложение, беспроводной контроллер PS2, CAN |
| Характеристики платы Raspberry Pi 5 | |
| Центральный процессор (CPU) | ARM Cortex-A76 64-бит, 4 ядра, 2,4 ГГц |
| Графический процессор (GPU) | VideoCore VII GPU @800 МГц |
| Оперативная память | 4 ГБ |
| Bluetooth | v5.0 с BLE |
| Порты для периферии | USB2.0 x 2, USB3.0 x 2 |
| Цифровой аудио/видеовыход | 2 x micro-HDMI (макс. разрешение 4K@60) |
| Видеодекодирование | H.265 (4K@60) |
| Сетевой интерфейс | Gigabit Ethernet / Wifi 802.11ac |
| GPIO / выводы | да |
| Порт для экрана | Display Serial Interface (MIPI DSI) |
| Потребляемая мощность | 25 Вт (5В / 5А) |
| Питание | 5В |
| Характеристики лидара N10P | |
| Сканирование | на 360° |
| Расстояние сканирования | 25 м |
| Частота сканирования | 6–12 Гц (настраиваемая) |
| Частота выборки | 5400 Гц |
| Выходные данные | угол, расстояние, яркость |
| Угловое разрешение | 0,4 – 0,8° (настраиваемое) |
| Светоустойчивость | 60K Люкс (подходит для помещений) |
| Тип интерфейса | последовательный порт (UART) |
| Принцип работы | TOF (время пролета) |
| Характеристики камеры глубины Astra | |
| Разрешение по глубине | 640 х 480 |
| Частота обновления и разрешение RGB | до 640 х 480, со скоростью 30 кадров в секунду |
| Угол поля зрения датчика RGB (горизонталь х вертикаль) | 63.1° х 49.4° |
| Угол обзора датчика глубины (горизонталь х вертикаль) | 58.4° х 45.5° |
| Базовая линия | ∼ 60 см |
| Диапазон глубины | 0.6 - 4 м |
| Габариты | 165 х 40 х 30 мм |
| Интерфейс передачи данных | USB 2.0 и выше |
| Характеристики двигателя | |
| Тип энкодера | GMR |
| Передаточное число редуктора | 1:60 |
| Номинальное напряжение | 12 В |
| Номинальный крутящий момент | 2 кг·см |
| Номинальный ток | 360 мА |
| Номинальная мощность | 4,32 Вт |
| Момент при блокировке | 9 кг·см |
| Ток при блокировке | 3,2 А |
| Характеристики сервопривода | |
| Максимальный угол | 180° |
| Напряжение | 4.8 - 7.4 В |
| Крутящий момент |
15.3 кг*см (5 В), 20 кг/см (6.5 В) |
| Скорость реакции | 0.14 с / 60° |
| Тип сервопривода | цифровой |
| Механизм | металлический редуктор |
| Рабочая "мертвая зона" | 3 мкс |
| Вес | 59.6 г |
| Характеристики батареи питания | |
| Напряжение питания | 12 В |
| Емкость | 5000 мАч |
| Напряжение отсечки (разряд) | 9 В |
| Рекомендуемый ток зарядки | 2 А |
| Габариты | 98,5 × 68,5 × 26 мм |
| Интерфейс | DC 5.5 × 2.1 мм |
| Вес | 268 г |
| Общие характеристики | |
| Корпус | алюминиевый сплав |
| Время автономной работы |
при небольшой нагрузке (скорость 0.45 м/с) ∼ 4 часа, при нагрузке 1 кг (скорость 0.45 м/с) ∼ 2.5 часа |
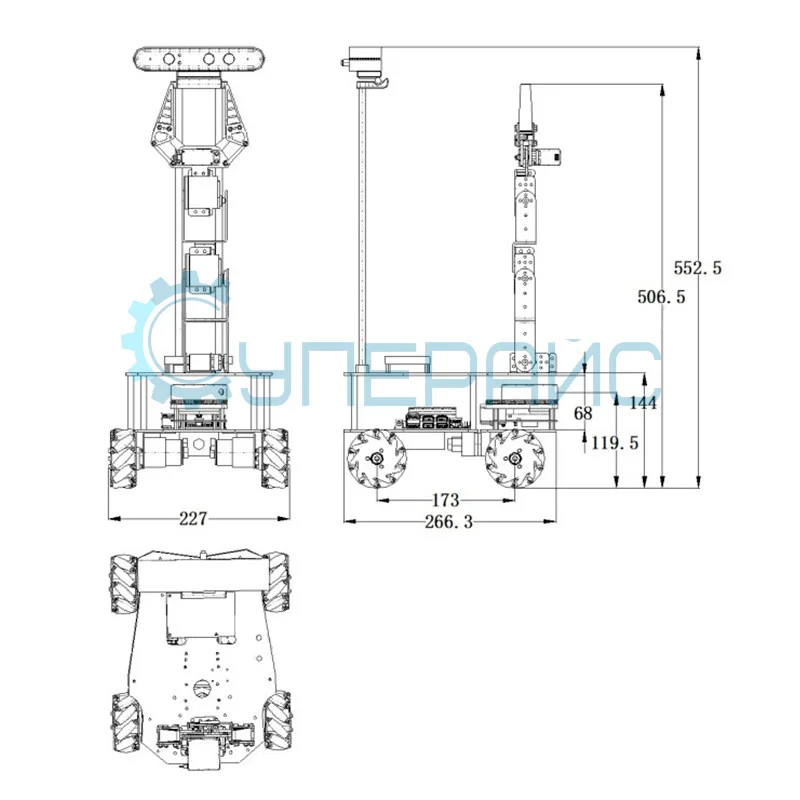
| Габариты | 270 х 222 х 187 мм |
| Вес автомобиля | ~ 2.9 кг |
| Комплектация | |

|
Raspberry Pi 5 – 1 шт |
 |
аккумулятор – 1 шт |

|
беспроводной контроллер PS2 – 1 шт |
 |
лидар – 1 шт |

|
двигатель MG513 - 4 шт |

|
колеса - 4 шт |
|
|
детали корпуса - 1 комплект |
|
|
маятниковый подвесной механизм - 1 набор |
|
|
металлическая фланцевая муфта - 4 шт |
|
|
крепежные элементы - 1 комплект |
|
|
кронштейн двигателя - 4 шт |
|
|
камера глубины - 1 шт |
|
|
гибкий механический коготь - 1 шт |
|
|
роботизированная рука - 1 шт |
|
|
зарядное устройство - 1 шт |
 Обратите внимание! Набор предполагает наличие у пользователя базовых навыков конструирования, программирования и отладки. Необходимые учебно-методические материалы по программированию робота размещены в разделе «ДОКУМЕНТАЦИЯ И ПО».
Обратите внимание! Набор предполагает наличие у пользователя базовых навыков конструирования, программирования и отладки. Необходимые учебно-методические материалы по программированию робота размещены в разделе «ДОКУМЕНТАЦИЯ И ПО».
Менеджеры по работе с клиентами не предоставляют консультации по программированию: набор предполагает самостоятельное программированием законченного устройства в целях развития и формирования у пользователя инженерного мышления и умений программирования робототехнических систем.
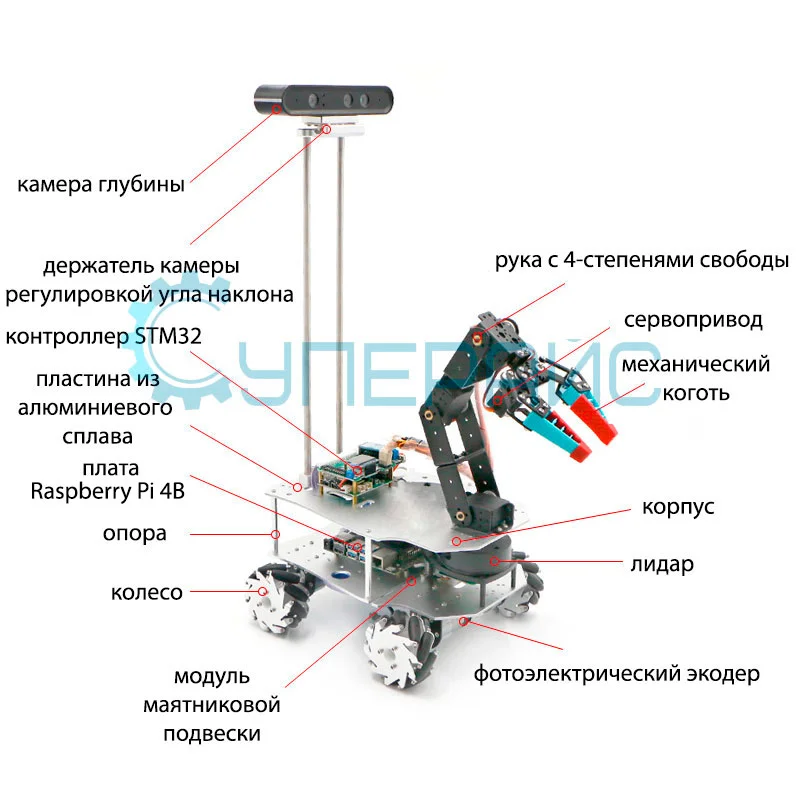
Манипулятор WHEELTEC R500A
WHEELTEC R500A – это робототехнический конструктор, который предлагает сборку «умного» устройства на колёсах. В результате получается робот-рука с камерой Astra Pro, использовать модель можно в качестве манипулятора для захвата и перемещения предметов небольшого размера. Устройство работает на базе операционной системы Ubuntu версии 18.04. Основным рабочим узлом, ответственным за управление, выступает плата Raspberry Pi 4B.

Установлен двигатель MG513. Привод в виде четырёхколёсной конструкции Mecanum с подвеской маятникового типа придаёт модели устойчивость. Эта робот-машина с манипулятором способна двигаться по неровным поверхностям, тогда как четыре степени свободы роботизированной руки способствуют широте пространства, в котором можно совершать те или иные действия. Поддерживается беспроводная сеть Wi-Fi, управление устройством может осуществляться через приложение для мобильного телефона, а также беспроводной контроллер.
Совмещение колёс и руки для проведения манипуляций в одном подвижном автономном роботе даёт пользователям универсальное решение для профессиональных и бытовых задач. Машина развивает скорость до 1.4 м/с, может поднимать грузы весом до 6 кг.
Поддерживаются разъёмы USB, micro-HDMI, а также GPIO. Это создаёт обширные возможности для подключения периферии. Материал корпуса представлен алюминиевым сплавом. Такой выбор обуславливает лёгкость и прочность конструкции, позволяя применять робота в различных условиях.
Документация и ПО WHEELTEC R500A
Отзывы WHEELTEC R500A

Сотрудничаем с коммерческими организациями и государственными бюджетными учреждениями.
Работаем по прямому договору и участвуем во всех видах конкурентных процедур в рамках 44-ФЗ и
223-ФЗ. Оказываем помощь в составлении технического задания на оборудование.
Заполните форму и получите всю нужную информацию о выбранном оборудовании в виде коммерческого предложения:
- актуальные цены и сроки поставки;
- информация о скидке;
- наличие на наших складах.
С этим товаром покупают
Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Похожие товары
Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Ранее просмотренные Вами
Для физических лиц при заказе от 5000 рублей Почтой России


Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России


Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России


Для физических лиц при заказе от 5000 рублей Почтой России

Благодарственные письма