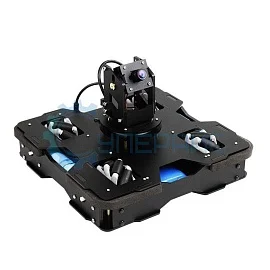
Робот-машина WHEELTEC R550 (4WD) PLUS ROS на плате Raspberry Pi 5 с независимой подвеской



 Доставка
Доставка
 Оплата
Оплата
 Для бизнеса
Для бизнеса
Характеристики WHEELTEC R550 (4WD) PLUS ROS
Общие данные
Основные характеристики
Общие характеристики
продвинутый
Посредством стандарта Wi-Fi из мобильного приложения со смартфона
обнаружение и объезд препятствий
умение отслеживать линии и движения по заданной траектории
движение за объектом
выполнение команд дистанционно
инженерия и проектирование
логика и мышление
робототехника
Описание WHEELTEC R550 (4WD) PLUS ROS
Технические характеристики WHEELTEC R550 PLUS
| Максимальная скорость | 1,82 м/с |
| Грузоподъёмность | 25 кг |
| Максимальный угол подъёма | 20° |
| Преодоление вертикального препятствия | 45 мм |
| Колёса | 6 дюймов (Ø152 мм) |
| Механизм подвески | независимая подвеска, подходит для неровной поверхности |
| Управление | мобильное приложение, беспроводной контроллер PS2, CAN |
| Особенности | движение в различных направлениях, дистанционное управление, движение по заданной траектории, предотвращение столкновения |
| Характеристики Raspberry Pi 5 | |
| SoC | Broadcom BCM2711 |
| Процессор | ARM Cortex-A76 2,4 ГГц, 64-разрядный (4 ядра) |
| Графический процессор | VideoCore VII @ 800 МГц |
| Оперативная память | 8 ГБ LPDDR4X |
| Производительность ИИ | 0,8 TOPS (FP16) |
| Bluetooth | Bluetooth 5.0 с BLE |
| Порты для периферии | 2 x USB 3.0, 2 x USB 2.0 |
| Цифровой аудио/видеовыход | 2 x micro-HDMI 2.0 |
| Максимальное выходное разрешение | 4K (3840x2160) 60 Гц |
| Максимальное разрешение в режиме двух мониторов | 2 x 4K 60 Гц |
| Аналоговый аудио/видеовыход | 4-контактный mini-jack 3,5 мм |
| Порт для камеры | 2 x MIPI CSI |
| Порт для дисплея | 2 x MIPI DSI |
| Карта памяти | microSD |
| Порты ввода-вывода GPIO | 40 |
| WiFi | 802.11ac, двухдиапазонный (2.4/5 ГГц) |
| Проводная сеть | Gigabit Ethernet |
| PoE | поддерживается через PoE+ HAT |
| Рабочая температура | 0 ~ 50°C |
| Питание | USB Type-C, 5 В / 5 А |
| Габариты | 85 x 56 x 17 мм |
| Характеристики двигателя MD36L P27 | |
| Напряжение питания | 24 В |
| Номинальная мощность | 60 Вт |
| Скорость холостого хода | 310 ± 12% об/мин |
| Номинальная скорость | 260 ± 12% об/мин |
| Номинальный крутящий момент | 10 кг·см |
| Момент при блокировке вала | 64 кг·см |
| Ток без нагрузки | 0,4 А |
| Номинальный ток | 2,9 А |
| Ток остановки | 22,1 А |
| Характеристики лидара M10P | |
| Максимальный радиус измерения | 30 м |
| Частота сканирования | 12 Гц |
| Частота выборки (сэмплирования) | 20000 Гц |
| Выходные данные | угол, расстояние |
| Угловое разрешение | 0,22° |
| Устойчивость к внешней засветке | до 100 000 Люкс (подходит для использования на улице) |
| Полный круг обзора (360°) | поддерживается |
| Принцип работы лидара | TOF |
| Интерфейс обмена | UART |
| Характеристики камеры глубины | |
| Разрешение карты глубины / частота кадров | до 640 х 480, со скоростью 30 кадров в секунду |
| Разрешение RGB-камеры / частота кадров | 1920 × 1080 @ 30 fps |
| Угол обзора RGB-камеры (горизонталь х вертикаль) | 66,1° х 40,2° |
| Диапазон глубины | 0,6 - 8 м |
| Интерфейс передачи данных | USB 2.0 и выше |
| Характеристики батареи питания | |
| Напряжение питания | 22,4В |
| Емкость | 6000 мАч |
| Ток зарядки | 3 А |
| Интерфейс | DC 4.0 × 1.7 мм (гнездо, зарядка), XT60U-F (разряд/питание нагрузки) |
| Общие характеристики | |
| Корпус | алюминиевый сплав |
| Питание | аккумуляторная батарея 24 В, 6000 мАч |
| Габариты | 580 × 532 × 234 мм |
| Вес | 10,7 кг |
| Комплектация | |

|
плата Raspberry Pi 5 8GB – 1 шт |

|
аккумулятор – 1 шт |
 |
лидар – 1 шт |

|
камера глубины и механизм регулировки наклона – 1 комплект |

|
дисплей - 1 шт |

|
беспроводной контроллер – 1 шт |

|
беспроводная клавиатура - 1 шт |

|
умная колонка M260C - 1 шт |
|
|
колеса – 4 шт |
|
|
провода – 1 комплект |
|
|
сервопривод - 1 шт |
|
|
двигатели - 4 шт |
|
|
рама шасси - 1 комплект |
 Менеджеры по работе с клиентами не предоставляют консультации по программированию: набор предполагает самостоятельное программированием законченного устройства в целях развития и формирования у пользователя инженерного мышления и умений программирования робототехнических систем.
Менеджеры по работе с клиентами не предоставляют консультации по программированию: набор предполагает самостоятельное программированием законченного устройства в целях развития и формирования у пользователя инженерного мышления и умений программирования робототехнических систем.
Обзорная таблица робоплатформ WHEELTEC R550
| Характеристики | R550 Omni Plus | R550 | R550 8-Mecanum | R550 Mecanum |
| Платформа управления | Jetson Nano | Raspberry 5 | Raspberry Pi 4B | Jetson Nano |
| Максимальная скорость | 1.1 м/с | 1,82 м/с | 1.39 м/с | 1.39 м/с |
| Грузоподъёмность | 50 кг | 25 кг | 120 кг | 120 кг |
| Колёса | 127 мм | 152 мм | 225 мм | 225 мм |
| Количество моторов | 3 | 4 | 8 | 8 |
| Мотор | MD60, 100 Вт | MD36L, 60 Вт | MD60, 100 Вт | MD60, 100 Вт |
| Лидар | M10P | M10P | N10 | M10P |
| Камера глубины | Astra Pro RGBD | |||
| Механизм подвески | - | независимая подвеска | независимая подвеска | независимая подвеска |
| Управление | мобильное приложение, беспроводной контроллер | |||
| Батарея | 22.2 В, 5000 мАч | 24 В, 6000 мАч | 22.2 В, 5000 мАч | 22.2 В, 5000 мАч |
| Время автономной работы (без нагрузки/с нагрузкой 3 кг) | ~3.5 ч / ~2.8 ч | |||
| Габариты | 557 x 477 x 88 мм | 580 × 532 × 234 мм | 766 x 623 x 183 мм | 766 x 623 x 183 мм |
| Вес | 25.8 кг | 29 кг | 38 кг | 38 кг |
Отзывы WHEELTEC R550 (4WD) PLUS ROS

Сотрудничаем с коммерческими организациями и государственными бюджетными учреждениями.
Работаем по прямому договору и участвуем во всех видах конкурентных процедур в рамках 44-ФЗ и
223-ФЗ. Оказываем помощь в составлении технического задания на оборудование.
Заполните форму и получите всю нужную информацию о выбранном оборудовании в виде коммерческого предложения:
- актуальные цены и сроки поставки;
- информация о скидке;
- наличие на наших складах.
С этим товаром покупают
Для физических лиц при заказе от 5000 рублей Почтой России
Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Похожие товары
Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Ранее просмотренные Вами
Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России
Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России


Благодарственные письма