Робот с голосовым управлением Yahboom ROSMASTER R2 Ultimate-NANO ROS Robot (без контроллера Jetson Nano)







 Доставка
Доставка
 Оплата
Оплата
 Для бизнеса
Для бизнеса
Характеристики Yahboom ROSMASTER R2 Ultimate-NANO ROS Robot
Общие данные
Основные характеристики
Общие характеристики
продвинутый
Посредством стандарта Wi-Fi из мобильного приложения со смартфона
обнаружение и объезд препятствий
умение отслеживать линии и движения по заданной траектории
нахождение выхода из лабиринта
движение за объектом
запись фото или видео
распознавание звука
распознавание лиц
распознавание жестов
выполнение команд дистанционно
отображение данных на встроенном дисплее
автопилот
камера глубины
Описание Yahboom ROSMASTER R2 Ultimate-NANO ROS Robot
Технические характеристики Yahboom ROSMASTER R2 Ultimate-NANO ROS Robot
| Операционная система | Ubuntu 18.04 LTS + ROS Melodic |
| Язык программирования | Python |
| Схема мотора | 520 мотор с энкодером x 2 |
| Рулевой механизм | цифровой сервопривод 20 кг*см |
| Управление роботом | мобильное приложение, ПК, джойстик |
| Связь | сеть Wi-Fi |
| Особенности | передача видео в реальном времени, автопилот, отслеживание объектов, распознавание лиц, отслеживание цвета, обнаружение краёв и автоматическое избегание столкновения |
| Характеристики модуля голосового управления | |
| Модуль | YB-4001 |
| Количество микрофонов | 2 |
| Расстояние приема | 6 м |
| Чувствительность | -38 дБВ/Па |
| Отношение сигнал-шум | 65 дБ |
| Напряжение | 5 В |
| Ток | 300 мА |
| Размер | 65 x 56 x 1.6 мм |
| Характеристики камеры Astra Pro Depth | |
| Точность | 1 м: ± 3 мм |
| Разрешение |
1280 x 1024 @ 7 fps 640 x 480 @ 30 fps 320 x 240 @ 30 fps 160 x 120 @ 30 fps |
| Чип обработки | MX400 |
| Поле зрения | H 58.4° x V 45.7° |
| Поле зрения RGB | H 66.10° x V 40.2° |
| Дальность | 0.6 - 8 м |
| Потребляемая мощность | < 2.5 Вт |
| Характеристики лидара | |
| Модель | YDLIDAR 4ROS |
| Сценарий работы | сканирование и позиционирование внутри помещений |
| Угловое разрешение |
0.09° при 5 Гц 0.13° при 7 Гц 0.22° при 12 Гц |
| Ток питания | 840 мА |
| Напряжение | 5 В |
| Потребление электроэнергии | 0.5 Вт |
| Радиус сканирования | 360° |
| Радиус измерения | 0.05 м - 30 м |
| Частота сканирования | 5 Гц - 12 Гц |
| Частота дискретизации | 20 000 раз/сек |
| Точность измерения |
≤ ± 6 см (0.05 - 5 м) ≤ ± 4 см (5 - 20 м) ≤ ± 10 см (20 - 30 м) |
| Степень защиты | IP65 |
| Размер | 75.8 x 70.3 x 34.7 мм |
| Характеристики мотора | |
| Тип мотора | щеточный, с постоянным магнитом |
| Напряжение | 12 В |
| Мощность | < 4 Вт |
| Ток | 0.3 А |
| Передаточное число двигателя | 1:19 |
| Крутящий момент при заблокированном роторе | 3.1 кг*см |
| Крутящий момент | 2.2 кг*см |
| Cкорость перед замедлением | 11000 об/мин |
| Скорость после замедления | 550 ±10 об/мин |
| Выходной вал | D-образный, 6 мм диаметр |
| Количество строк | 11 |
| Тип интерфейса | PH 2.0 |
| Характеристики батареи | |
| Емкость | 6000 мАч |
| Номинальный ток | 8.8 А |
| Максимальный ток | 10 А |
| Защита | от перегрузки, короткого замыкания |
| Размер | 64 x 43 x 75 мм |
| Вес | 300 г |
| Зарядное устройство | 12.6 В, 800 мА |
| Штекер | t-образный + DC 4.0*1.7 |
| Общие характеристики | |
| Материал корпуса | алюминий |
| Питание | батарея 6000 мАч (12,6 В) |
| Время работы | ~ 90 мин |
| Габариты изделия | 337,5 x 260 x 191 мм |
| Габариты упаковки | 380 х 255 х 215 мм |
| Вес брутто | 4 кг |
| Совместимость | Микрокомпьютер Jetson Nano 4GB Developer Kit (SUB) |
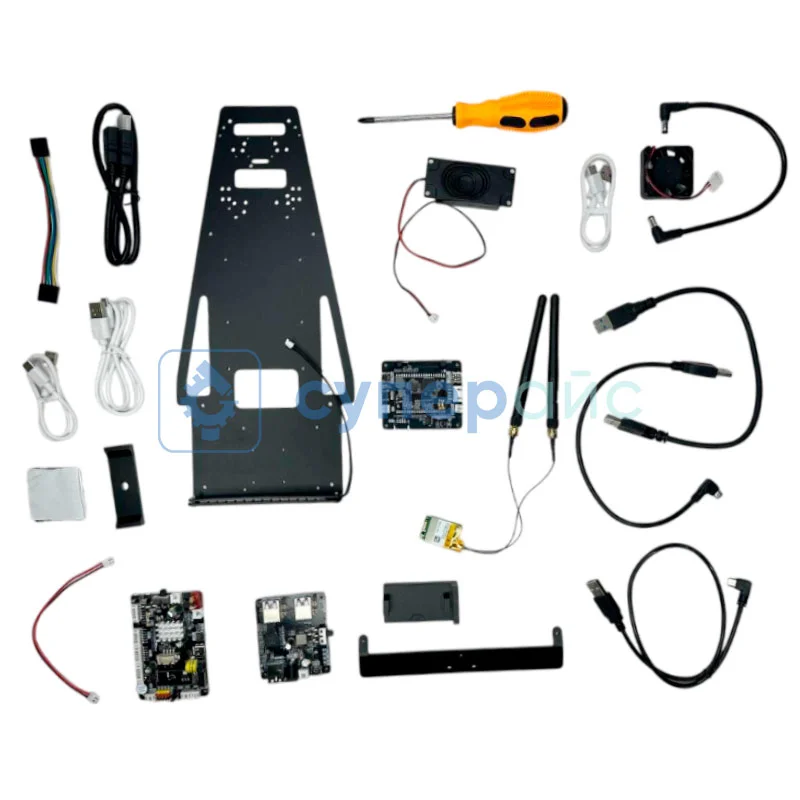
| Комплектация | |

|
плата управления – 1 шт |

|
модуль голосового управления - 1 шт |

|
мотор - 2 шт |

|
аксессуары к контроллеру - 1 шт |

|
флеш-накопитель 64 Гб с ОС для робота - 1 шт |

|
лидар - 1 шт |

|
камера глубины Astra Pro Depth - 1 шт |
 |
джойстик - 1 шт |

|
держатель для мобильного телефона - 1 шт |

|
аккумуляторная батарея – 1 шт |
 |
зарядное устройство - 1 шт |
 |
отвертка – 1 шт |

|
шасси акермана - 1 шт |
|
|
колесо - 4 шт |
|
|
комплект деталей - 3 шт |
|
|
плата USB HUB - 1 шт |
|
|
световая панель LED - 1 шт |
|
|
крепление для лидара - 1 шт |
|
|
крепление для LED освещения - 1 шт |
|
|
клейкая лента белая световодная - 1 шт |
|
|
кабели – 1 комплект |
|
|
oled экран - 1 шт |
|
|
сенсорный дисплей 7" - 1 шт |
|
|
крепление для сенсорного дисплея - 1 шт |
Обратите внимание: плата Jetson Nano в комплект не входит.
 Обратите внимание! Набор представляет собой конструктор и предполагает наличие у пользователя базовых навыков конструирования, программирования и отладки.
Обратите внимание! Набор представляет собой конструктор и предполагает наличие у пользователя базовых навыков конструирования, программирования и отладки.
Менеджеры по работе с клиентами не предоставляют консультации по программированию: набор предполагает самостоятельную сборку управляющего устройства на базе микрокомпьютера и набора датчиков с последующим программированием законченного устройства в целях развития и формирования у пользователя инженерного мышления и умений программирования робототехнических систем.
Конструктор Yahboom ROSMASTER R2 Ultimate-NANO ROS Robot
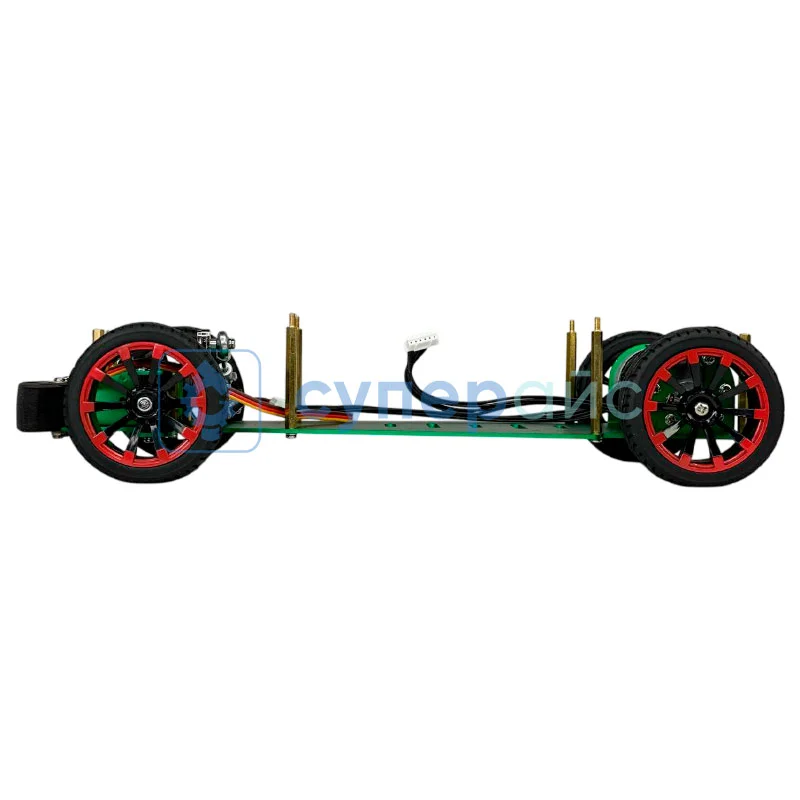
Робот с голосовым управлением Yahboom ROSMASTER R2 Ultimate-NANO ROS Robot представляет собой подвижное "умное" устройство с машинным зрением. Четырехколесная конструкция обеспечивает стабильность и маневренность, что делает модель подходящей для различных сценариев и условий эксплуатации. В комплект входит камера глубины, помогающая роботу ориентироваться в пространстве и взаимодействовать с окружающей средой.
Лидар со сканированием на 360 градусов измеряет расстояние и обнаруживает препятствия. Такие функции, как автопилот и отслеживание объектов, делают платформу автономной и поддерживающей обратную связь.
Операционная система Ubuntu 18.04 LTS, работающая вместе с ROS Melodic, формирует программную базу для разработки и реализации различных приложений. Язык программирования Python упрощает создание собственных управляющих алгоритмов. Четырёхколёсный робот Ultimate-NANO ROS поддерживает такие способы управления, как использование мобильного приложения, ПК и джойстика, что увеличивает гибкость в эксплуатации. Связь через Wi-Fi позволяет легко подключаться к устройству и передавать данные в реальном времени.
Батарея на 6000 мАч обеспечивает длительную автономную работу. Модель подходит для учебных заведений, исследовательских лабораторий и хобби. Робот станет универсальным инструментом для обучения и экспериментов, платформой для создания инновационных решений.

Обзорная таблица роботов ROSMASTER R2
| Характеристики | Ultimate-RPi | Ultimate-NANO |
| Операционная система | Ubuntu 18.04 LTS + ROS Melodic | |
| Язык программирования | Python | |
| Схема мотора | 520 мотор с энкодером x 2 | |
| Рулевой механизм | цифровой сервопривод 20 кг*см | |
| Управление роботом | мобильное приложение, ПК, джойстик | |
| Связь | сеть Wi-Fi | |
| Модуль голосового управления | есть | |
| Радиус сканирования лидара | 360° | |
| Емкость батареи | 6000 мАч | |
| Тип флеш накопителя | TF - карта | U диск |
| M.2 антенна | нет | есть |
Документация и ПО Yahboom ROSMASTER R2 Ultimate-NANO ROS Robot
Отзывы Yahboom ROSMASTER R2 Ultimate-NANO ROS Robot

Плюсы:
✔️ Качество сборки – робот сделан добротно: металлический корпус, прочные крепления, приятная на ощупь отделка. Ощущается как серьёзный образовательный инструмент, а не игрушка.
✔️ Голосовое управление – работает достаточно чётко, базовые команды (движение, повороты, простые действия) распознаёт хорошо, даже с акцентом. Удобно для демонстраций.
✔️ Поддержка ROS – отличный вариант для изучения ROS (Robot Operating System). Хорошая документация от Yahboom, есть примеры кода и tutorials.
✔️ Модульность – можно расширять датчиками и камерами, если докупить недостающие компоненты.
Минус:
❌ Без Jetson Nano – неполная комплектация. Но тут же заказала модуль отдельно, менеджер подсказал какой лучше подходит.
Искала набор именно с поддержкой голосового управления, помогли. Все нравится)
Здравствуйте, наконец-то прошло время после покупки и я решилась на отзыв)
Плюсы:
✔️ Качество сборки – робот сделан добротно: металлический корпус, прочные крепления, приятная на ощупь отделка. Ощущается как серьёзный образовательный инструмент, а не игрушка.
✔️ Голосовое управление – работает достаточно чётко, базовые команды (движение, повороты, простые действия) распознаёт хорошо, даже с акцентом. Удобно для демонстраций.
✔️ Поддержка ROS – отличный вариант для изучения ROS (Robot Operating System). Хорошая документация от Yahboom, есть примеры кода и tutorials.
✔️ Модульность – можно расширять датчиками и камерами, если докупить недостающие компоненты.
Минус:
❌ Без Jetson Nano – неполная комплектация. Но тут же заказала модуль отдельно, менеджер подсказал какой лучше подходит.
Искала набор именно с поддержкой голосового управления, помогли. Все нравится)
Здравствуйте, Анна!
Огромное спасибо за развёрнутый и детальный отзыв — такие отклики особенно ценны. Очень рады, что робот Yahboom ROSMASTER R2 Ultimate-NANO оправдал ваши ожидания как серьёзный образовательный инструмент, а не просто развлечение.
Отдельно приятно узнать, что вы оценили качество сборки, работу голосового управления и поддержку ROS. Мы действительно стараемся предлагать решения, которые подойдут как для обучения, так и для практических задач, и ваш опыт — отличное тому подтверждение.
Благодарим за понимание по поводу комплектации — хорошо, что удалось быстро сориентироваться с выбором подходящего модуля. Мы всегда стараемся сопровождать клиента не только на этапе покупки, но и после.
Успехов вам в работе с платформой и новых интересных проектов!
С уважением, Администрация магазина Суперайс
Сотрудничаем с коммерческими организациями и государственными бюджетными учреждениями.
Работаем по прямому договору и участвуем во всех видах конкурентных процедур в рамках 44-ФЗ и
223-ФЗ. Оказываем помощь в составлении технического задания на оборудование.
Заполните форму и получите всю нужную информацию о выбранном оборудовании в виде коммерческого предложения:
- актуальные цены и сроки поставки;
- информация о скидке;
- наличие на наших складах.
С этим товаром покупают
Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Похожие товары
Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Ранее просмотренные Вами
Для физических лиц при заказе от 5000 рублей Почтой России
Благодарственные письма