Комплект для сборки робота Yahboom ROS Transbot Robot с дисплеем и HD камерой (без контроллера Jetson Nano)





 Доставка
Доставка
 Оплата
Оплата
 Для бизнеса
Для бизнеса
Характеристики Yahboom ROS Transbot Robot
Общие данные
Основные характеристики
Общие характеристики
продвинутый
Робот луноход
Посредством стандарта Wi-Fi из мобильного приложения со смартфона
обнаружение и объезд препятствий
умение отслеживать линии и движения по заданной траектории
нахождение выхода из лабиринта
движение за объектом
запись фото или видео
воспроизведение звуков
распознавание цвета
распознавание жестов
захват и перемещение небольших предметов
отображение данных на встроенном дисплее
управление роботами с помощью движения руки и жестов
автопилот
камера глубины
Описание Yahboom ROS Transbot Robot
Технические характеристики Yahboom ROS Transbot Robot с HD камерой
| Особенности | передача видео в реальном времени, автопилот, отслеживание объектов, распознавание лиц, отслеживание цвета, обнаружение краёв и автоматическое избегание столкновения |
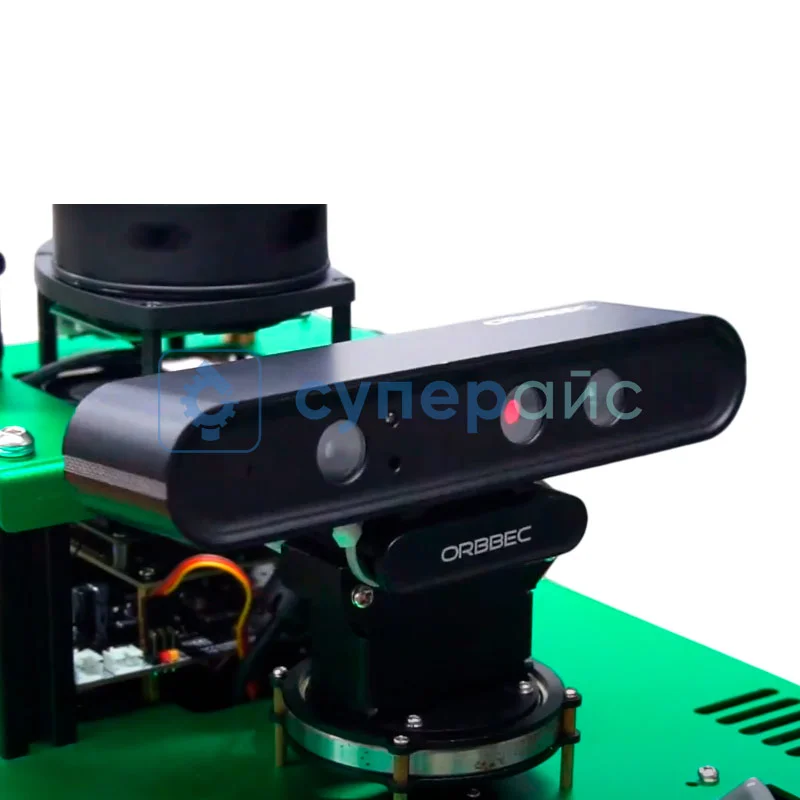
| Характеристики камеры Astra Pro Depth | |
| Точность | 1 м: ± 3 мм |
| Разрешение |
1280 x 1024 @ 7 fps 640 x 480 @ 30 fps 320 x 240 @ 30 fps 160 x 120 @ 30 fps |
| Чип обработки | MX400 |
| Поле зрения | H 58.4° x V 45.7° |
| Поле зрения RGB | H 66.10° x V 40.2° |
| Дальность | 0.6 - 8 м |
| Потребляемая мощность | <2.5 Вт |
| Характеристики HD-камеры | |
| Формат изображения | YUV/MJPG |
| Количество мегапикселей | 2 мп |
| Разрешение видео | 320х240, 640х480, 1280х720, 1920х1080 |
| Объектив | f/2.8 мм |
| Поле зрения | 80 ~ 120° (зависит от разрешения видео) |
| Частота кадров | 30 ~ 120 fps |
| Ток в режиме сна | < 10 мА |
| Рабочий ток | <200 мА |
| Рабочее напряжение | DC 5 В |
| Интерфейс | USB 2.0 |
| Рабочая температура | 0 - 65 °C |
| Температура хранения | -20°C ~ +60°C |
| Характеристики лидара | |
| Модель | A1M8 |
| Сценарий работы | сканирование и позиционирование внутри помещений |
| Угловое разрешение | <1° |
| Ток питания | 100 мА |
| Напряжение | 5 В |
| Потребление электроэнергии | 0.5 Вт |
| Радиус сканирования | 360° |
| Радиус измерения | 0.15 м - 12 м |
| Частота сканирования | 5.5 Гц - 10 Гц |
| Точность измерения |
±1% (≤ 3м) ±2% (≤ 3 - 5м) ±2.5% (≥ 5м) |
| Характеристики манипулятора | |
| Максимальный угол | 300° ±15° |
| Напряжение | 6 - 7.4 В |
| Крутящий момент | 15 кг*с*см / 7.4 В |
| Скорость реакции | 0.3 сек / 60° 7.4 В |
| Тип сервопривода | сервопривод последовательной шины |
| Вес | 50 г |
| Характеристики мотора | |
| Тип мотора | щеточный, с постоянным магнитом |
| Напряжение | 12 В |
| Мощность | < 4 Вт |
| Ток | 0.3 А |
| Передаточное число двигателя | 1:56 |
| Крутящий момент при заблокированном роторе | 8.3 кгФ*см |
| Крутящий момент | 6.5 кгФ*см |
| Cкорость перед замедлением | 12000 об/мин |
| Скорость после замедления | 205 ±10 об/мин |
| Выходной вал | D-образный, 6 мм диаметр |
| Количество строк | 11 |
| Тип интерфейса | PH 2.0 |
| Характеристики батареи | |
| Емкость | 4400 мАч |
| Номинальный ток разряда | 8.8 А |
| Максимальный ток разряда | 10 А |
| Защита | от перегрузки, короткого замыкания |
| Размер | 68 x 55 x 37 мм |
| Вес | 300 г |
| Зарядное устройство | 12.6 В, 800 мА |
| Общие характеристики | |
| Материал корпуса | алюминий |
| Питание | 2 аккумуляторные батареи 4400 мАч (12,6 В) |
| Время работы | ~ 120 мин |
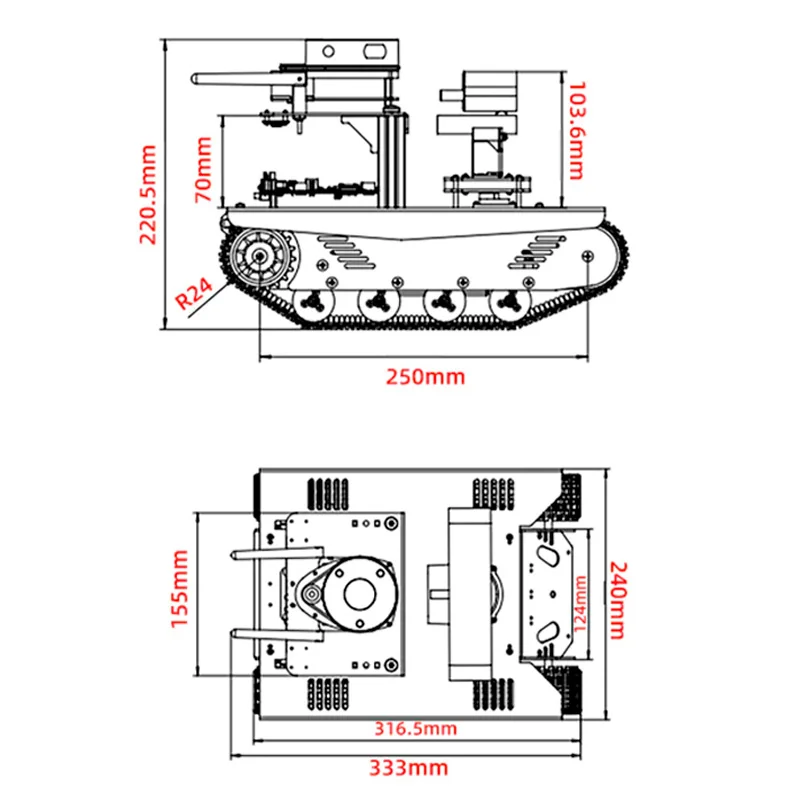
| Габариты изделия | 180 x 172 x 210 мм |
| Габариты упаковки | 425 х 315 х 310 мм |
| Вес брутто | 7,55 кг |
| Совместимость | Микрокомпьютер Jetson Nano 4GB Developer Kit (SUB) |
| Комплектация | |

|
шасси - 1 шт |

|
плата расширения – 1 шт |

|
крепление для лидара - 1 шт |
 |
джойстик - 1 шт |

|
держатель для мобильного телефона - 1 шт |

|
зарядное устройство - 1 шт |

|
кабели – 1 комплект |

|
кабель microUSB – 1 шт |

|
кабельный хомут – 1 шт |

|
отвертка – 1 шт |

|
механический код и шашечная бумага – 1 шт |

|
комплект деталей - 3 комплекта |

|
oled экран - 1 шт |
 |
батарейный блок - 1 шт |

|
батарейный корпус - 1 шт |

|
кабель MicroUSB - 1 шт |

|
лидар - 1 шт |
 |
камера глубины Astra Pro Depth - 1 шт |

|
опора камеры глубины - 1 шт |

|
фиксированный кронштейн для камеры глубины - 1 шт |

|
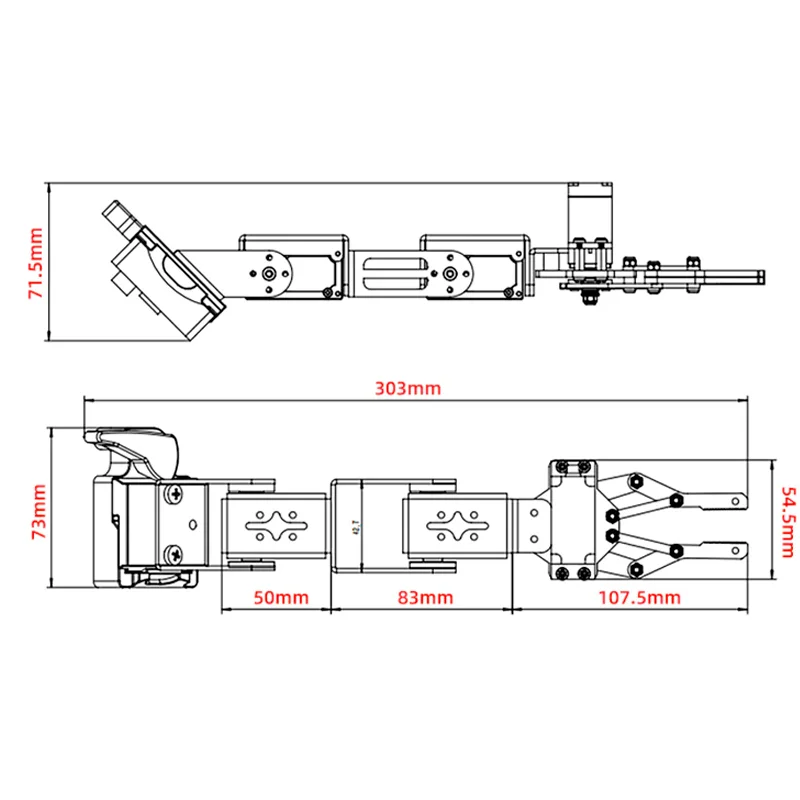
манипулятор - 1 шт |

|
быстросъемный фиксатор - 1 шт |

|
крепежная пластина - 1 шт |

|
комплект проводов - 1 шт |

|
руководство по эксплуатации – 1 шт |

|
упаковочная коробка - 1 шт |
Обратите внимание: плата Jetson Nano в комплект не входит.
 Обратите внимание! Набор представляет собой конструктор и предполагает наличие у пользователя базовых навыков конструирования, программирования и отладки.
Обратите внимание! Набор представляет собой конструктор и предполагает наличие у пользователя базовых навыков конструирования, программирования и отладки.
Менеджеры по работе с клиентами не предоставляют консультации по программированию: набор предполагает самостоятельную сборку управляющего устройства на базе микрокомпьютера и набора датчиков с последующим программированием законченного устройства в целях развития и формирования у пользователя инженерного мышления и умений программирования робототехнических систем.

Обзорная таблица роботов Yahboom
| Характеристики | ROS Transbot Robot | ROS Transbot Robot с дисплеем и HD камерой |
| HD-камера | нет | да |
| Точность камеры Astra Pro Depth | 1 м: ± 3 мм | |
| Модель лидара | A1M8 | |
| Частота сканирования лидара | 5.5 Гц - 10 Гц | |
| Радиус измерения лидара | 0.15 м - 12 м | |
| Крутящий момент манипулятора | 15 кг*с*см / 7.4 В | |
| Тип мотора | щеточный, с постоянным магнитом | |
| Мощность мотора | < 4 Вт | |
| Емкость батареи | 4400 мАч | |
| Материал корпуса | алюминий | |
| Время работы | ~ 120 мин | |
Набор для сборки робота Yahboom ROS Transbot Robot с дисплеем и HD камерой
Yahboom ROS Transbot с лидаром и HD-камерой — это программируемое сборное устройство для исследований и разработок в сфере робототехники. Входящие в комплектацию детали позволят собрать робота (танк) в алюминиевом корпусе.
Особенности Yahboom ROS Transbot:
- передача видео в режиме онлайн — позволяет удаленно наблюдать за окружением;
- автопилот — поддерживает автономное передвижение;
- отслеживание объектов — способен следить за движущимися предметами;
- распознавание лиц — идентифицирует людей в поле зрения камеры;
- отслеживание цветов — различает и следует за объектами определенного цвета;
- обнаружение контуров предметов — может ориентироваться в пространстве;
- избегание столкновений — не врезается в препятствия при движении.
Основу платформы составляет камера Astra Pro Depth с разрешением до 1280x1024, которая обеспечивает точность измерения глубины ±3 мм на расстоянии 1 м и работает в диапазоне 0,6 - 8 м.
Лидар A1M8 выполняет 360-градусное сканирование для измерения расстояния. Манипулятор робота обладает хорошей гибкостью и способен вращаться практически на полный круг, обеспечивая доступ к объектам под различными углами и в широком пространстве. Скорость реакции 0.3 сек / 60 градусов при напряжении 7,4 В свидетельствует о быстром и точном позиционировании.
Такой набор для самостоятельной сборки роботов помогает развивать следующие навыки:
- работы с элементами современной мехатроники;
- программирования в системе ROS (Robot Operating System);
- обработки информации с сенсоров и камер;
- настройки компьютерного зрения и машинного обучения;
- работы с микрокомпьютерами и встраиваемыми системами.
Yahboom ROS Transbot представляет собой полезную платформу из прочного материала для образования и экспериментов.
Два аккумулятора емкостью 4400 мАч дают до 120 минут автономной работы. Компактное исполнение и вес 7,55 кг делают робота маневренным и устойчивым при движении.
Документация и ПО Yahboom ROS Transbot Robot
Отзывы Yahboom ROS Transbot Robot

Все детали были упакованы аккуратно, ничего не повреждено. Комплект идет без контроллера Jetson Nano, но это не проблема, так как я уже имел такой контроллер. Если у вас его нет, придется докупить отдельно, но это того стоит.
Здравствуйте, Анатолий!
Спасибо за ваш отзыв и за то, что поделились своим опытом! Мы рады, что детали пришли в целости и сохранности, а их качество вас устроило.
Да, вы правы – комплект не включает контроллер Jetson Nano, но, как вы отметили, это отличное дополнение для тех, кто хочет получить максимальную функциональность. Ваше замечание будет полезно для других клиентов, которые планируют приобрести аналогичный комплект.
С уважением, Администрация магазина Суперайс
Сотрудничаем с коммерческими организациями и государственными бюджетными учреждениями.
Работаем по прямому договору и участвуем во всех видах конкурентных процедур в рамках 44-ФЗ и
223-ФЗ. Оказываем помощь в составлении технического задания на оборудование.
Заполните форму и получите всю нужную информацию о выбранном оборудовании в виде коммерческого предложения:
- актуальные цены и сроки поставки;
- информация о скидке;
- наличие на наших складах.
С этим товаром покупают
Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Похожие товары
Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Для физических лиц при заказе от 5000 рублей Почтой России

Ранее просмотренные Вами
Для физических лиц при заказе от 5000 рублей Почтой России

Благодарственные письма