WHEELTEC. Программируемые роботы для взрослых



 4.7K
4.7K Одноплатные микрокомпьютеры получили широкое распространение в различных областях науки и техники. Их применение практически безгранично и открывает широкий простор для реализации различных технических и творческих решений.
Основными областями применения одноплатных микрокомпьютеров являются: схемы автоматизации технологических процессов, управление робототехническими устройствами и DIY-проектами, создание умного дома, мультимедийного центра или развертывание сервера, навигация и искусственный интеллект.
![]() Время чтения: 17 минут
Время чтения: 17 минут

- Первый микрокомпьютер
- На чем собраны современные микрокомпьютеры?
- Виды микрокомпьютеров
- Устройства для профессионального программирования
- Какую платформу для программирования роботов выбрать?
- Роботы и конструкторы от WHEELTEC ROS
- Программное обеспечение робота и обучение программированию
- Питание и зарядка робота
- Какие конструкции шасси роботов бывают?
- Шасси Аккермана
- Шасси с маятниковой подвеской
- Всенаправленное шасси
- Шасси на гусеницах
- Шасси с полным приводом
- Стационарная платформа
- Шагающее такси
- Чем отличаются шасси робототехнических устройств?
- Внешние устройства робота
- ТОП-5 роботов-конструкторов
История
Первым одноплатным компьютером считается сконструированный на базе процессора Intel C 8080A «DYNA-MICRO». Он был представлен в 1976 году в США. С него и ему подобных устройств началась эпоха домашних персональных компьютеров.
Снижение цен на микроэлектронику повысили доступность компьютеров, что привело к выделению отдельного класса – персональный компьютер (ПК).
Требования к росту производительности и наличие обязательных конструктивных элементов (слоты для подключения внешней видео карты, нескольких плат памяти, размещения системы охлаждения процессора и контроллеров) привели к росту размеров персональных компьютеров.
Размеры же промышленных одноплатных компьютеров только уменьшались. И в настоящее время ограничиваются только размерами процессора, контроллеров периферийных устройств и числом доступных разъемов.
Современные микрокомпьютеры
Микрокомпьютеры (МК) можно условно разделить на низкоскоростные и высокоскоростные. К первым относятся устройства сконструированные на базе микроконтроллеров, STM, PIC и AVR например. Их рабочие частоты ограничены десятками, максимум – сотнями мегагерц.
Высокоскоростные устройства выполнены на высокоскоростных микроконтроллерах и процессорах ARM, Intel, AMD и других. Они обладают высокими вычислительными мощностями и рабочими частотами выше 1 ГГц.
Современные платы микрокомпьютеров
К промышленным микрокомпьютерам предъявляются жесткие требования по надёжности, функционалу и соответствия различным технологическим стандартам. Можно выделить следующих производителей промышленных МКК: DFRobot, Axiomtek, Advantech, Microchip, Phytec, RockPi, Seeed Studio, SolidRun, VersaLogic Corporation и другие.
Однако для рядовых пользователей часто не требуется функционал промышленных устройств. Для них, в первую очередь, важна цена.
В настоящее время на рынке микрокомпьютеров большую нишу занимают такие устройства как Orange Pi, FriendlyARM, Banana Pi, Raspberry Pi и NVIDIA Jetson.
Эти платформы широко применяются в образовании и науке для работы с конструкторами и роботами, машинного обучения и локальной автоматизации.
Взрослое программирование
Большинство людей, заинтересовавшихся автоматизацией, робототехникой или программированием микроконтроллеров (МК), начинают с устройств собранных на базе МК AVR или STM.
Однако низкая производительность и слабые вычислительные возможности не позволяют настроить работу этих устройств в качестве медиаустройств, серверов, применить технологии искусственного интеллекта (AI) и другие современные технологии.
Платформы на базе процессоров ARM и Cortex наиболее распространены. Для них производятся различные робототехнические устройства в виде манипуляторов, подвижных наземных и летающих устройств.
Одноплатные микрокомпьютеры требуют для своей работы операционную среду на базе UNIX. Чаще всего это Ubuntu или FreeBSD. Здесь от пользователя уже потребуются не рядовые знания языков программирования, а серьёзные навыки работы с Linux.
Выбор платформы
При переходе с устройств на базе микроконтроллеров к платам на микропроцессорах. Большинство пользователей выбирает роботизированные конструкторы на основе Raspberry Pi. Однако в настоящее время большую конкуренцию создают устройства на базе NVIDIA Jetson Nano. Основным их преимуществом выступает графический процессор обладающий высокими показателями производительности. Конструкторы на платформе NVIDIA Jetson ориентированы на активную обработку видео и решение задач искусственного интеллекта.
Raspberry Pi
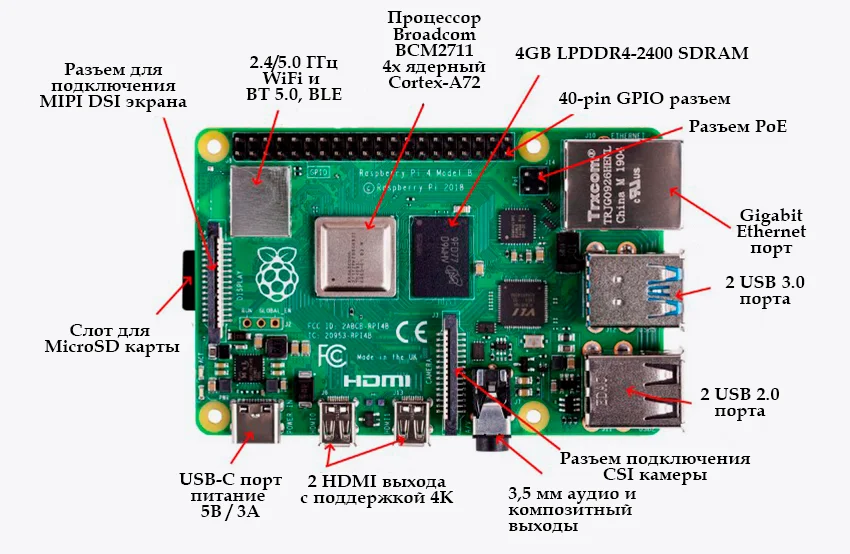
Raspberry Pi 4 Model B - один из последних продуктов в популярной линейке компьютеров Raspberry.
Производитель предлагает революционное увеличение скорости процессора, производительности мультимедиа, памяти и возможностей подключения, сохраняя при этом обратную совместимость и такое же энергопотребление, что и Raspberry Pi 3 Model B+ предыдущего поколения.
Ключевые особенности этого продукта включают:
- высокопроизводительный 64-битный четырехъядерный процессор;
- поддержку двух дисплеев через пару портов micro-HDMI с разрешением до 4K;
- аппаратное декодирование видео с разрешением до 4K p60, до 4 ГБ ОЗУ;
- двухдиапазонную беспроводную локальная сеть 2,4/5,0 ГГц;
- Bluetooth 5.0;
- Gigabit Ethernet;
- 2 порта USB 3.0 и 2 USB 2.0;
- возможность PoE (через отдельную надстройку PoE HAT).
Благодаря повышенной производительности, по сравнению с предыдущей моделью, Raspberry Pi 4 является мощной платформой для обмена данными. А благодаря встроенному USB 3.0 он станет надежным хостом для аппаратного ускорителя, искусственного интеллекта и глубокого машинного обучения.
NVIDIA Jetson Nano
NVIDIA Jetson Nano это компактная плата, размером примерно 70x45 мм, с большим радиатором. Она оснащена очень мощным микрочипом NVIDIA Tegra X1, который содержит четыре процессорных ядра ARM, а также 128 графических процессоров (GPU). Графические процессоры используются не только для обработки графики. Это связано с тем, что некоторые приложения, связанные с нейронными сетями, могут использоваться для распознавания шаблонов с высокой точностью. Наличие большого числа графических процессоров, позволяет более эффективно использоваться
Существует полная версия процессора Tegra X1 с вдвое большим количеством ядер графического процессора. Она предназначена для решения большого количества задач, включая игры, а также использование ее в автомобилях, где она управляет автоматической парковкой.
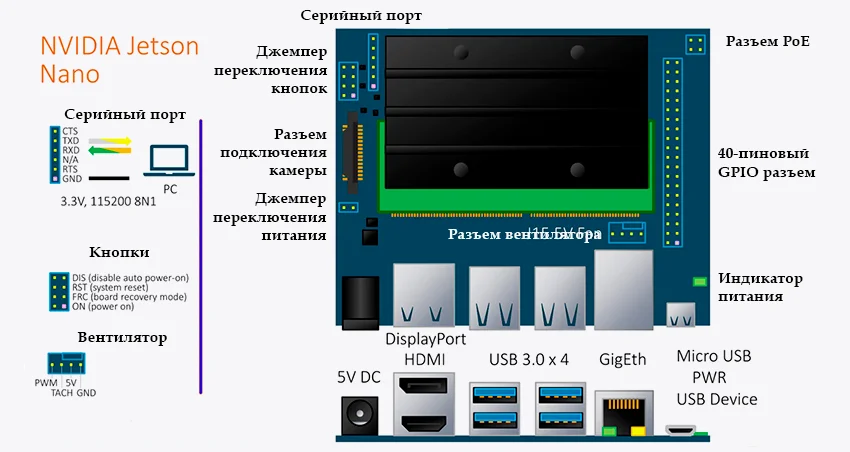
Jetson Nano представляет собой небольшой форм-фактор модуля памяти с двухрядным расположением выводов (SO-DIMM), уже подключенный к компактной несущей плате 100x80 мм, вместе образующий комплект разработчика. Плата имеет множество типичных компьютерных интерфейсов, таких как USB 3.0, Gigabit Ethernet и HDMI видео (с поддержкой 4k до 60 кадров в секунду). Также есть разъемы, очень похожие на те, что есть на Raspberry Pi. Есть 40-контактный разъем расширения, который по компоновке практически идентичен разъему Pi. Также присутствует поддержка камеры Raspberry Pi.
Сравнение плат
| Raspberry Pi 4B | Jetson Nano | |
| CPU | Quad-core ARM Cortex-A72 64-bit @ 1.5 GHz | Quad-Core ARM Cortex-A57 64-bit @ 1.42 GHz |
| GPU | Broadcom VideoCore VI (32-bit) 500 MHz 28 nm | NVIDIA Maxwell w / 128 CUDA cores @ 921 MHz 20 nm |
| LPDDR | 4GB LPDDR4 | 4GB LPDDR4 |
| Networking | Gigabit Ethernet / Wifi 802.11ac | Gigabit Ethernet / M.2 Key E (for Wifi support) |
| Display | 2x micro-HDMI (up to 4Kp60) | HDMI 2.0 and eDP 1.4 |
| USB | 2x USB 3.0, 2x USB 2.0 | 4x USB 3.0, USB 2.0 Micro-B |
| Video Encoder | H264(1080p30) | H.264/H.265 (4Kp30) |
| Video Decoder | H.265(4Kp60) / H.264(1080p60) | H.264 / H.265 (4Kp60, 2x 4Kp30) |
| GPIO | 40-pin GPIO | 40-pin GPIO |
Процессор Raspberry Pi хоть имеет более высокую рабочую частоту, однако проигрывает в размере кэша: 1МБ против 3МБ у NVIDIA. Jetson Nano более ориентирован на выполнение графических расчетов. Его частота почти в 2 раза выше соперника, число шейдеров выше в 2 раза (256), присутствуют блоки растровых и текстурных операций.
Образовательные роботы WHEELTEC ROS
Конструкторы WHEELTEC, как и большинство подобных устройств, разработаны на основе плат Arduino, NVIDIA Jetson Nano и Raspberry Pi.
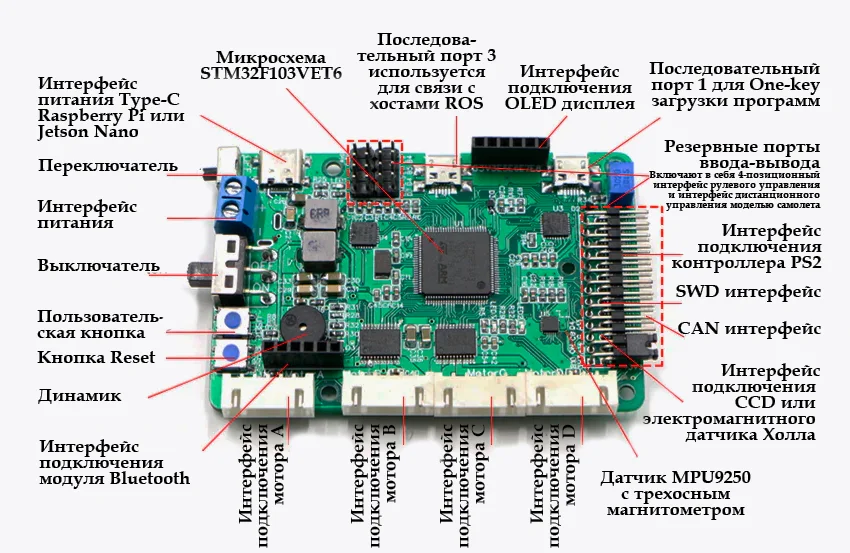
Для управления шасси и периферийным оборудованием конструкторы комплектуются дополнительной платой – контроллером на базе STM32F103VET6.
Основной средой программирования предлагается открытая среда разработки и обучения ROS (Robot Operating System).
В зависимости от модели и комплектации, роботы способны к:
- навигации;
- построению карт;
- автономному перемещению;
- электронному управлению;
- работе со сканирующим радаром;
- работе в режиме визуального отслеживания и патрулирования.
Управление роботом возможно при помощи:
- передачи изображения через приложение;
- беспроводного геймпада PS2;
- управление по шине CAN;
- управление по последовательному порту.
В сочетании с лазерным лидаром и RTABMAP Vision устройства поддерживают такие алгоритмы построения карт как: Visual Slam, GMapping, Hector, Karto, Google Cartographer и другие. Присутствует поддержка навигации с фиксированной точкой, многоточечная навигация. Лазерный радар может следовать за объектами, в том числе за людьми.
В режиме визуального патрулирования и слежения устройство может взаимодействовать с электрически активным или магнитным следом, реагировать на синий, черный, красный, зеленый, желтый и другие настраиваемые цвета линий патрулирования.
Используя приложение можно контролировать движение устройства следя за изображением получаемым с камеры.
Программные требования и обучение
Для настройки и управления роботом производитель рекомендует использовать Ubuntu версии не ниже 18.04, ROS Melodic и FreeRTOS для STM32.
Для освоения конструкторов доступны:
- основы программирования в ROS;
- низкоуровневое управление STM32;
- разработка ROS;
- учебные пособия по Ubuntu;
- видеоуроки по разработке в среде ROS;
- видеоурок по управлению двигателями включая: теоретический анализ, реализацию на языке программирования, схема управления, полный код управления.
Так как ROS и WHEELTEC постоянно развиваются и совершенствуются, то при возникновении затруднений при программировании конструкторов можно обратиться в сообщество пользователей и разработчиков.
Блок питания и литиевая батарея
В роботах WHEELTEC используются аккумуляторы повышенной емкости - до 6 А.ч.
Зарядное устройство обеспечивает защиту с защиты от перегрузки, короткого замыкания, перенапряжения и перезаряда.

Конструкция шасси WHEELTEC
Программируемые роботы WHEELTEC могут быть собраны на различных шасси:
- шасси системы Аккермана;
- шасси с маятниковой подвеской;
- шасси Omni-directional;
- гусеничное шасси;
- полный привод с независимой маятниковой подвеской.
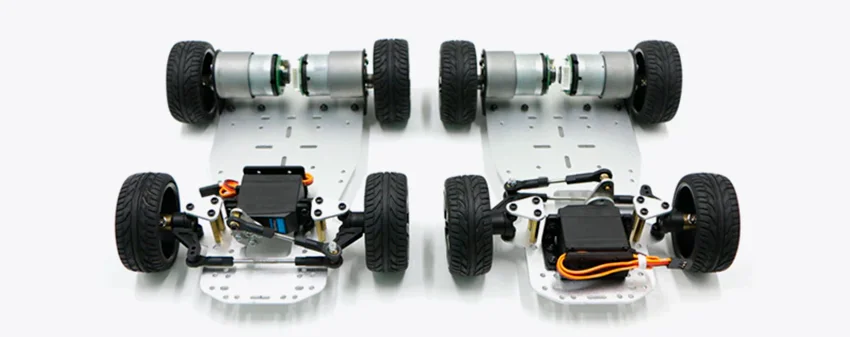
Шасси системы Аккермана
Система рулевого Аккермана – это система размещения рычагов управления, обеспечивающая создание разных радиусов поворота колес размещенных на одной оси. На шасси возможно установки как прямой дифференциальной структуры, так и обратной - анти-Аккермана.
Роботы с данным типом шасси:
Программируемый робот WHEELTEC Ackerman ROS
Робот WHEELTEC Ackerman ROS с сенсорным экраном
Роботизированная платформа WHEELTEC Ackerman на Raspberry Pi 4B (4 ГБ)
Колесное шасси оснащённое маятниковой подвеской
Соосная маятниковая система подвески состоит из двух платформ связанных подвижным соединением. Платформы могут менять свои положения относительно горизонтальной оси. Данный тип шасси позволяет роботу адаптироваться к неровной поверхности и удобен при преодолении различных препятствий.

Роботы на этом типе шасси:
Программируемый робот WHEELTEC Mecanum Wheel Edition с контроллером PS2
Четырехколесный робот WHEELTEC Ackerman ROS с маятниковой подвеской
Робот-автомобиль WHEELTEC Ackerman ROS
Роботизированная рука WHEELTEC R500A с гибким механическим когтем
Робот автомобиль WHEELTEC R350A PLUS с пультом дистанционного управления
Робот WHEELTEC Mecanum wheel ROS с сенсорным экраном
Робот WHEELTEC Mecanum Wheel Edition на Raspberry Pi 4B (4 ГБ)
Шасси Omnidirectional с всенаправленными колесами
Omnidirectional - это конструкция из трех всенаправленных колес установленных на круглой платформе. Управляя скоростью вращения двигателей можно перемещать робота в любом направлении, без необходимости поворота платформы.
Роботы на этом типе шасси:
Всенаправленная версия WHEELTEC Omni-directional wheel с сенсорным экраном
Всенаправленный робот WHEELTEC Omni-directional wheel version

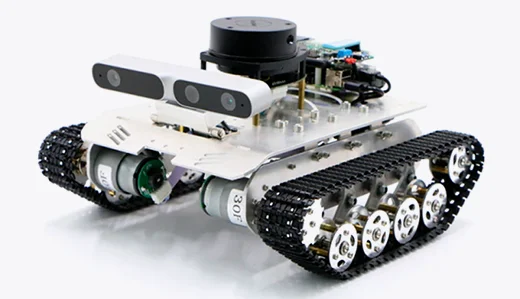
Гусеничное шасси
Гусеничное шасси обладает высокой проходимостью. Роботы, собранные на данной платформе, способны перемещаться по траве, каменистой и песчаной поверхности, а также преодолевать крутые подъемы.
Роботы на этом типе шасси:
Гусеничный робот WHEELTEC Tracked vehicle ROS с сенсорным экраном
Полноприводное шасси багги Raider
Это тип колесного шасси в полноприводном исполнении и независимой маятниковой подвеской. Большой размер колес и их независимая подвеска делает данный тип шасси самым высокопроходимым.
Роботы на этом типе шасси:
Роботизированный автомобиль WHEELTEC Ackerman ROS с независимой подвеской

Стационарная платформа
Стационарные платформы, чаще всего, комплектуются одним, реже – двумя механическими манипуляторами. Снабженные камерой они способны выполнять цветовую или размерную сортировку, отслеживание, распознавание и повторение жестов.
Роботы на этом типе шасси:
Робот-манипулятор с камерой WHEELTEC moveit на базе Raspberry Pi
Роботизированный манипулятор c камерой WHEELTEC moveit на базе NVIDIA Jetson Nano

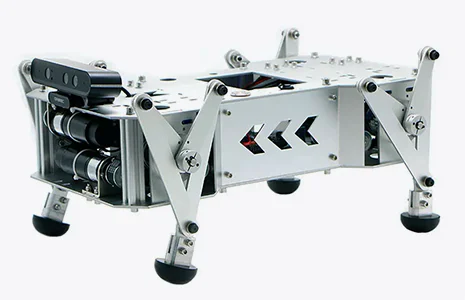
Шагающее шасси
Данный тип шасси кардинально отличается от остальных. Здесь применен планетарный тип мотор-редуктора. Основной сложностью является сложность точного согласования работы всех приводов для задания движения робота в нужном направлении.
Роботы на этом типе шасси:
Сравнительная характеристика шасси роботов WHEELTEC
|
|
Системы Аккермана |
Шасси с маятниковой подвеской |
Шасси Omni-directional |
Гусеничное шасси |
Полный привод с независимой маятниковой подвеской |
Шагающее шасси |
|
Тип колес |
Ведущие колеса - 65 мм, резиновые; Ведомые колеса: 60 мм, металлические всенаправленные. |
Колеса Mecanum из алюминиевого сплава 75 мм. |
3 металлических всенаправленных колеса диаметром 60 мм. |
Двухприводный гусеничный механизм с независимой подвеской и амортизацией |
4 резиновых колеса диаметром 65 мм с независимой маятниковой подвеской.
|
4 планетарных мотор-редуктора. |
|
Рулевой механизм |
Цифровой, с высоким крутящим моментом. |
нет |
нет |
нет |
нет |
нет |
|
Вес шасси |
1,8 кг |
2,9 кг |
2,18 кг |
2,54 кг |
2,9 кг |
10,2 кг |
|
Грузоподъемность |
3 кг |
6 кг |
3 кг |
4 кг |
6 кг |
3 кг |
|
Максимальная скорость |
1,2 м/с |
1,4 м/с |
0,84 м/с |
1 м/с |
1,4 м/с |
0,2 м/с |
|
Время работы со скоростью 0,45 м/с: - при легкой нагрузке: - нагрузка в 1 кг: |
5,5 часа 4 часа |
4 часа 2,5 часа |
5 часов 3 часа |
5,5 часа 4 часа |
4 часа 2,5 часа |
0,5 часа - |
|
Мотор |
MG513 |
MG513 |
MG513 |
MG513 |
MG513 |
MG513 |
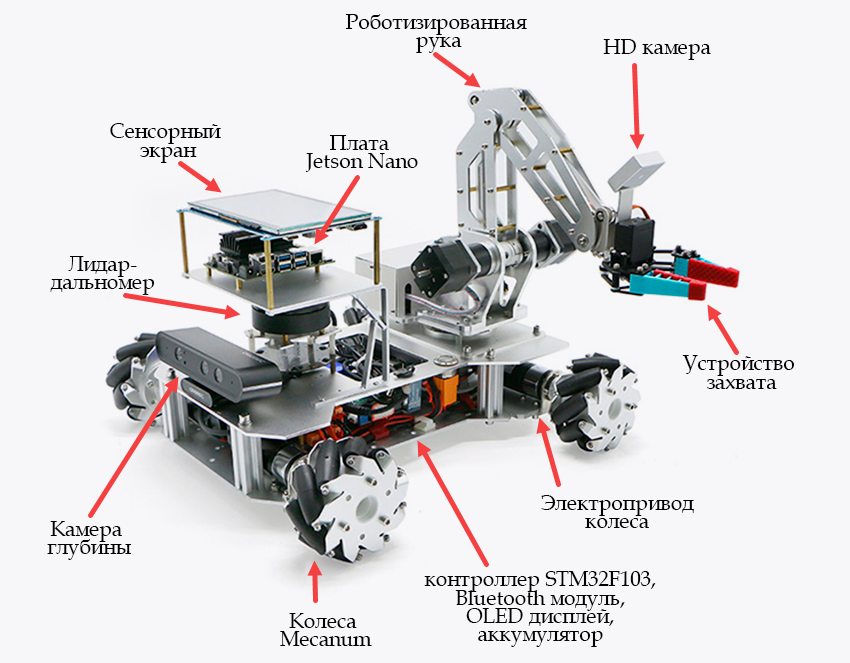
Периферийное оборудование роботов
Внешние устройства давайте рассмотрим на примере робота автомобиля WHEELTEC R350A PLUS. Его расширенная комплектация включает практически все доступные элементы и конструкции.
В состав робота входят:
- плата Jetson Nano;
- контроллер STM32F103;
- электрический привод;
- Bluetooth модуль;
- OLED дисплей;
- камера глубины;
- сенсорный экран;
- роботизированная рука;
- устройство захвата;
- видеокамера;
- лидар – дальномер;
- аккумулятор.
Наши рекомендации по выбору робототехнических конструкторов
- 6 степеней свободы.
- Крутящий момент – 20 кг.
- Грузоподъёмность – 200…300 г.
- HD камера.
- Управление через мобильное приложение, беспроводной PS2 контроллер или CAN.
- Шасси с маятниковой подвеской.
- Колеса Mecanum.
- Грузоподъемность устройства – 6 кг.
- Сенсорный экран.
- Камера глубины.
- Лазерный радар.
- Управление осуществляется через мобильное приложение, беспроводной контроллер или CAN-шину.

- Планетарный мотор-редуктор на 35 Вт.
- Грузоподъёмность - 3 кг.
- Камера глубины.
- Управление: через мобильное приложение, При помощи пульта ДУ.
- Возможности устройства: дистанционное управление, ходьба, следование за предметом.

- Максимальная скорость - 2,4 м/с.
- Грузоподъемность - до 60 кг.
- Вес – 15 кг.
- Время работы: при легкой нагрузке - до 28 часов, при нагрузке 10 кг - до 20 часов.
- Камера глубины, сенсорный экран (опционально).
- Способы контроля: приложение, PS2 (проводной контроллер), CAN-порт, последовательный порт.

- Полноприводное шасси с независимой подвеской.
- Максимальная скорость - 2.33 м/с.
- Грузоподъёмность - 22 кг.
- Лидар.
- Камера глубины.
- Сенсорный экран (опционально).
- Управление через мобильное приложение, беспроводным контроллером PS2, по CAN-шине.
- Особенности робота: движение в различных направлениях, дистанционное управление, движение по заданной траектории, предотвращение столкновения.

Большое разнообразие шасси и дополнительных внешних устройств делает WHEELTEC одними из наиболее популярных роботизированных конструкторов.
Большое комьюнити обеспечит поддержку и позволит решить большинство возникающих вопросов как со сборкой и подключением, так и с настройкой и оптимизацией работы роботов WHEELTEC.
Совместимость конструкторов как с платами NVIDIA Jetson Nano, так и с Raspberry Pi делают данную линейку роботов-конструкторов идеальным для серьёзных занятий программированием.
Спасибо за прочтение.
1.3K
662
457







